Information Technology Reference
In-Depth Information
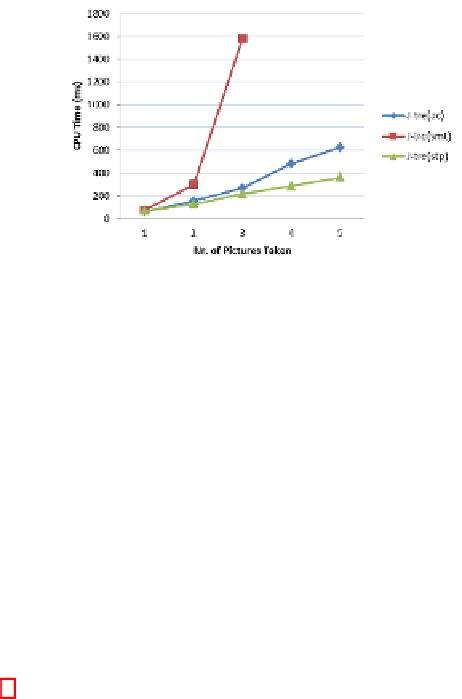
Fig. 5.
Comparative results on the GOAC-
lite
domain
data to Earth, two on board resources, namely, memory and power usage. Notice that
while GOAC-
lite
was a purely planning problem, because the key aspect was the causal
combination of constraints among platform-camera-PTU, the GOAC-
plus
is a quite
challenging planning and scheduling problem.
During operation, the rover should follow some rules to maintain safe and effective
configurations. Namely, the following conditions must hold during the overall mission:
(i) while the robot is moving, the PTU must be in the safe position (pan and tilt at 0)
and 40W of power are required; (ii) the robotic platform can take a picture only if the
robot is still in one of the requested locations while the PTU is pointing to the related
direction and if an adequate amount of on board memory is available to store the pic-
ture; (iii) once a picture has been taken, the rover has to communicate the picture to
the base station; (iv) while communicating the rover has to stay still, 60W of power
are requested and the memory is released of the amount of transmitted file; (v) while
communicating, the orbiter needs to be visible.
In Figure 6 we detail the values that can be assumed by these state variables and
the legal value transitions in accordance with the mission requirements and the robot
physics. The robot can be in a position (
At
(
x, y
)
) or moving towards a destination
(
GoingTo
(
x, y
)
). The PTU can assume a
PointingAt
(
pan,tilt
)
value if pointing a
certain direction, while, when moving, it assumes a
MovingTo
(
pan,tilt
)
value. The
camera either takes a picture of a given object in a position
x, y
with the PTU in
pan,tilt
(
TakingPicture
(
file
−
id,x,y,pan,tilt
)
) or is idle. Similarly, the commu-
nication
facility
can
be
either
operative
and
dumping
a
given
file
(
Communicating
(
file
id
)
) or idle. The reusable resource
Po wer
represents con-
sumed power in time while the consumable resource
Memory
represents memory con-
sumption in time. Additionally, one external resource, the
HRDL
, represents contingent
events, i.e., the communication channel availability.
As an example, a possible mission action sequence can be the following: navigate to
one of the requested locations, move the PTU pointing at the requested direction, take a
picture, then, communicate the image to the orbiter during the next available visibility
window, put back the PTU in the safe position and, finally, move to the following re-
quested location. Once all the locations have been visited and all the pictures have been
communicated, the mission is considered successfully completed.
−