Environmental Engineering Reference
In-Depth Information
4
2
0
x
n
−
2
−
4
0
128
256
384
512
n
(a)
40
20
0
x
n
−
20
−
40
0
128
256
384
512
n
(b)
40
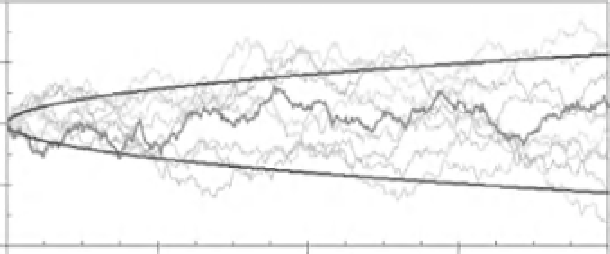
Figure 3.4
White noise and Brownian
motions. (a) An example of a Gaussian
white noise. Successive values are chosen
randomly from a Gaussian distribution
(
E
quation 3.2, Figure 3.2) with zero mean
(
x
=
0
.
0) and unit variance (
σ
20
0
x
n
x
=
1
.
0).
Adjacent values are not correlated. (b) The
white noise in (a) is summed using
Equation 3.4 to give a Brownian motion.
(c) Twelve examples of Brownian motions
are superimposed, each constructed from a
white noise. The envelope (solid parabolic
line) gives the standard deviation after
n
steps (Equation 3.5).
−
20
−
40
0
128
256
384
512
n
(c)
We have shown how an uncorrelated time series can
be created with a Gaussian distribution of values. How-
ever, the Gaussian distribution has limitations, including
the fact that the distribution is symmetric and values
are specified over the range
−∞
<
x
n
<
∞
. Many time
series have frequency-size distributions that are heavily
asymmetric and/or are restricted to only positive values.
All five real-world time series given in Figure 3.1 have
positive values only, with just two of the examples show-
ing (some) symmetry in the frequency-size distributions.
There are many other statistical distributions used to
model time series, with just one example of a widely
used one for positive values (and asymmetry) being the
log-normal distribution.



Search WWH ::

Custom Search