Environmental Engineering Reference
In-Depth Information
system [O;
xyz
]
G
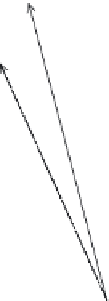
. Figure 4 shows the splitting of a wind turbine in its components
and indicates the relation between local and global geometric descriptions.
Let
R
and
T
k
denote respectively the position and the rotation matrix of the
local system [O;
xyz
] of component
k
with respect to[O;
xyz
]
G.
defi ne
the linear velocity and acceleration while the time derivatives of
T
k
introduce the
angular velocity and the Coriolis and centrifugal accelerations. Then for a point P
of component
k
, initially at the local position
r
and currently at
RR
and
k
k
,
rr
=+ ⋅
Su
() (,)
r
yt
0
with respect to [O;
xyz
]:
rPt
,
(;)
=
Rt
()
+
T
()(;)
t rPt
( 10 )
Gk
k
k
The dynamic equations with respect to [O;
xyz
]
G
will involve the global acceleration
(for simplicity subscript
k
and dependencies have been removed):
r
=+ + +
Rr
T
TSu
2
TSu
+
TSu
( 11 )
0
as well as the projection of the equations on the local directions. Projection on
local directions is necessary because the elastic formulation is defi ned in the local
(beam) system for each component. Local directions must be given with respect to
[O;
xyz
]
G
which is done by the transpose of
T
k
So eqn (7) takes the form:
′
⎛
⎞
∫
0T T
∫
1T T
(d ( )
r
A
ST
r
−
⎜
(d ( )
r
A
ST
r
⎟
G
G
⎝
⎠
Ay
()
Ay
()
(12 )
′
′′
′
′′
∫
0T T
=
(d ()
r
A
ST
g
+
[
Ku
′
][
+
Ku
′′
] [
+
Ku
′′
][
+
Ku
′
]
+
I
d
L
+
BL
11
22
12
21
a
Ay
()
y
z
r
k
x
r
Gk
O
x
y
y
G
, y
O
z
R
k
O
G
,O
x
G
, x
z
G
, z
Figure 4 : Co-ordinate systems defi nition.


































Search WWH ::

Custom Search