Geoscience Reference
In-Depth Information
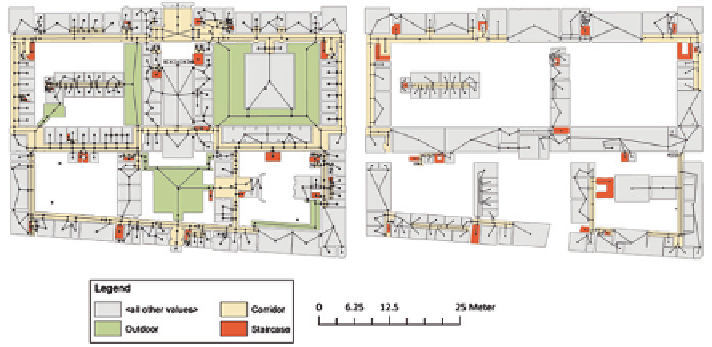
Fig. 3
Floor plan of the ground floor (
left
) and first floor (
right
) with their 3D indoor network
and choice. Therefore, in a future part of this research project, the dependency of
the performance of cognitive algorithms on the indoor network topology will be
investigated.
4 Implementation and Analysis of Least Risk Paths
in Indoor Space
4.1 Analysis of Least Risk Paths Within Indoor Space
In the next section, the results of our analyses of the least risk path algorithm in
indoor space are presented. The analyses are performed on two distinct levels:
first, a general overview of the entire dataset is compared to the results of the orig-
inal least risk path algorithm; second, a subset dataset is selected for more in-depth
analyses. The main question interweaving the entire analyses section remains to
investigate whether least risk paths have a similar advantage to shortest paths in
terms of navigational complexity as is the case in outdoor space.
4.1.1 Analysis of the Entire Dataset
The entire dataset consists of more than 600 nodes and more than 1,300 edges which
required a computation of almost 800,000 paths to exhaustively calculate all possible
paths between all nodes for both the shortest as well as the least risk path algorithm.
As stated before, we would like to investigate whether least risk paths have the
same connotation as in outdoor space, i.e. minimizing the overall risk of getting