Geoscience Reference
In-Depth Information
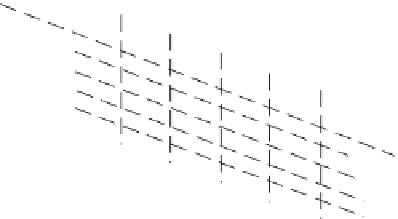
Abb. 4.96
Unterteilung
eines Messquerschnitts beim
Lotrechtenverfahren. (Ott
2008
)
Messlotrechte
Abflusssegment
0
Fließquerschnitt
Zellen
1
2
3
4
DGPS-Messungen. Eine weitere Lösung bietet der Einsatz des klassischen Lotrech-
tenverfahrens, wie es typischerweise bei Flügelmessungen (s. Kap. 4.5.4) einge-
setzt wird, da hierbei Lotrechte für Lotrechte die Messtiefe bestimmt wird. Für das
Lotrechtenverfahren stehen stationär arbeitende ADCP-Messgeräte zur Verfügung.
Messverfahren:
Beim Lotrechtenverfahren wird der Messquerschnitt unter
Berücksichtigung der Gewässergeometrie in eine Vielzahl von Messlotrechten
(Vertikale) eingeteilt. Abbildung
4.96
zeigt schematisch die Unterteilung in Mess-
lotrechte und horizontale Ebenen (Zellen).
Lage und Anzahl der Messlotrechten werden vom Anwender festgelegt.
An jeder Messlotrechten wird analog zur Durchführung einer integrativen Flü-
gelmessung das Messgerät positioniert und das dann stationäre ADCP misst die
Messtiefe und das Geschwindigkeitsprofil (s. Abb.
4.97
). Mit Hilfe mathematischer
Verfahren wird daraus die mittlere Geschwindigkeit
v
m
einer Lotrechten bestimmt.
Messgeräte:
Für ADCP-Messungen nach dem Lotrechtenverfahren können zum
einen die in Kap. 4.6.2.2 bei der Moving Boat-Methode vorgestellten Messgeräte
verwendet werden; die ursprünglich nur beim StreamPro-ADCP vorhandene Option
„section by section“, die dem oben beschriebenen Lotrechtenverfahren entspricht,
ist heute bei allen ADCP-Geräten, die mit neuerer Software, wie z. B. WinRiver II,
betrieben werden, möglich.
Zum anderen gibt es im Qliner eine Weiterentwicklung der Anwendung des
Aquadopp von NorTek (s. Kamminga
2005
und Abb.
4.99
). Dabei handelt es sich
um ein Katamaranboot aus glasfaserverstärktem Kunststoff (ca. 1 m lang und 50 cm
breit; Gewicht 11 kg), unter dessen Rumpf ein Ultraschall-Doppler-Profiler vom
Typ Aquadopp befestigt ist (Abb.
4.99
). Die Frequenz beträgt, je nach gewünschter
Messtiefe, 1 oder 2 MHz. Die erforderliche minimale Wassertiefe ist entsprechend
0,45 bzw. 0,35 m. Das Gerät hat einen Messbereich in der Geschwindigkeit von
±10 m/s und erreicht nach Herstellerangaben bei einer maximalen Messfrequenz
von 1 Hz eine Genauigkeit von ±0,5 cm/s. Als Bediengerät dient ein Pocket PC, die
Daten werden per Bluetooth funkübertragen.
Der Qliner arbeitet mit 4 Schallstrahlern (s. Abb.
4.98
). Schallstrahl 1 und 2
berechnen die Geschwindigkeit und werden alternativ zur Tiefenmessung heran-




Search WWH ::

Custom Search