Geoscience Reference
In-Depth Information
the decay period over which measurements are made are
set by the system base frequency (see
Section 5.7.3.1
). The
actual periods of the AEM waveforms shown in the
gure
can be determined for their respective base frequencies (see
Appendix 2
)
. For most AEM systems the base frequency
can be changed and the system response optimised for
different geological targets (for example see
Fig. 5.100
)
.
Increasing the amplitude of the primary pulse increases
the strength of the secondary decay and reduces noise,
particularly at late times, allowing detection of deeper
conductors and slow-decaying high-conductivity conduct-
ors (see Conductor quality in
Section 5.7.2.3
). There are
practical limitations to the dipole moment that can be
created in AEM system, owing to restrictions on both the
physical size and weight of the transmitter loop and the
equipment needed to generate the current. As explained
previously (
Section 5.7.1.2
), the inductance of the loop has
a signi
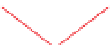
One cycle
Amplitude
Rx channels
8-11
+
0
SPECTREM
100% duty cycle
25-90 Hz base frequency
-
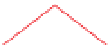
Amplitude
+
Rx channels
15 (25 Hz)
0
TEMPEST (100%)
100% duty cycle
12.5-225 Hz base frequency
-
Rx channels
15 (25 Hz)
Amplitude
+
TEMPEST (50%)
0
50% duty cycle
12.5-225 Hz base frequency
-
Rx channels
30
cant and detrimental effect on the ramp turn-off.
Consequently, most high-power systems have a slow pulse
turn-off with the decay measurements commencing at a
relatively long time after the start of the turn-off. This
reduces resolution of the early-time response of the
near-surface and the rapidly decaying responses from
conductors with lower conductivity (see
Section 5.7.2
). In
contrast, low-power systems have a faster turn-off allowing
the secondary decay measurements to commence closer to
the start of the pulse turn-off. They produce better reso-
lution of near-surface conductors and fast-decaying low-
conductivity conductors, but at the expense of reduced
penetration (because of reduced signal-to-noise ratio).
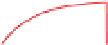
Amplitude
+
XTEM
0
25% duty cycle
25 Hz base frequency
-
Rx channels
37-40
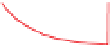
Amplitude
+
SkyTEM
508
(super high moment )
0
20-25 % duty cycle
12.5-25 Hz base frequency
-
Rx channels
35
Amplitude
+
SkyTEM
304
(high moment)
0
50% duty cycle
25 Hz base frequency
5.9.1.2
Measuring the step and impulse responses
Both B-field and coil sensors are used for making step and
impulse response measurements in ground and downhole
EM systems (see
Section 5.7.1.7
)
. To avoid the complexities
-
Rx channels
20-30
Amplitude
GEOTEM
MEGATEM
HELITEM
+
0
10-50% duty cycle
12.5-90 Hz base frequency
-
transmitted waveform shown as TEMPEST (50%). Note that the
actual amplitude of the transmitted pulse varies widely between the
systems and is not depicted in the
Rx channels
17
16
figure. Details of each are as
available at the time of our writing and the reader is referred to the
various system providers for updated information about individual
systems. SPECTREM waveform reproduced with the permission of
Spectrem Air; GEOTEM, MEGATEM, HELITEM and TEMPEST
waveforms reproduced with the permission of CGG; XTEM
waveform reproduced with the permission of GPX Surveys; SkyTEM
waveforms reproduced with the permission of SkyTEM Surveys; and
details of the AeroTEM waveform from Balch et al.(
2003
) and
Huang and Rudd (
2008
).
Amplitude
+
AeroTEM
0
20-50% duty cycle
25-150 Hz base frequency
-
Time
Figure 5.97
Schematic illustrations of one cycle of the system
waveforms, including the response measurement window, of various
TD-AEM systems. TEMPEST (100%) is obtained from the actual

















































































































Search WWH ::

Custom Search