Geoscience Reference
In-Depth Information
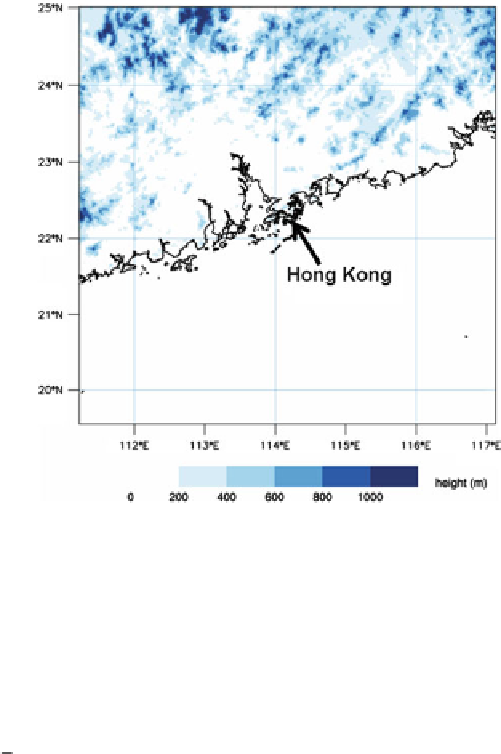
Fig. 22.1
Domain coverage
and terrain height of
RAPIDS-NHM
automatic weather stations, wind profilers, total precipitable water vapour from the
Global Positioning System (GPS), radar Doppler velocity and radar wind retrieval
(see next section).
In NHM-3DVAR, the model optimal analysis is calculated from the best linear
unbiased estimate of the control variables representing the model states that
minimize the following cost function:
/
D
J
b
C
J
o
D
1
x
x
B
/
T
C
1
/
T
J.
x
2
.
x
x
B
/
B
.
2
.
y
Hx
/
R
.
y
Hx
(22.1)
where
x
x
B
are respectively control variable vector and model background
field. The control variables of NHM-3DVAR include horizontal wind components,
pressure, potential temperature and pseudo relative humidity in terms of the ratio of
specific humidity of water vapour to its saturation value.
y
represents a state vector
containing observation data and
H
is the observation operator. In (
22.1
),
B
and
R
are respectively background and observation error covariance matrices where model
error represented in the
B
matrix is estimated using the NMC method (
Parrish and
Derber 1992
).
In RAPIDS-NHM, Doppler velocity data from the two S-band weather radars
in Tai Mo Shan and Tates' Cairn in Hong Kong are used. Radar radial velocity
data on selected CAPPI levels (at altitudes from 1 to 3 km above sea levels) are
thinned to separate the wind data into about three grid-point spacing (5-6 km) in
order to reduce the correlation between them. The radial velocity data are passed
;
Search WWH ::

Custom Search