Geoscience Reference
In-Depth Information
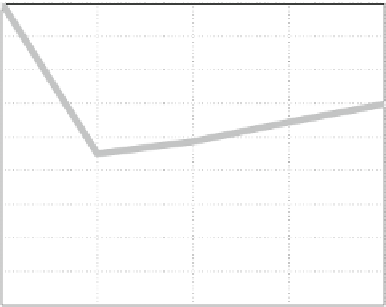
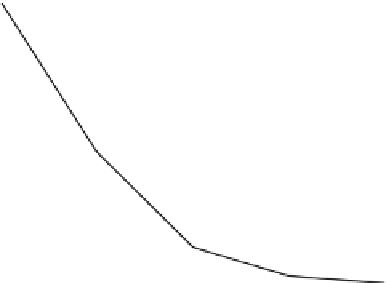
Fig. 10.3
The normalized
total cost function,
J
, from
the nonlinear (
grey
) and linear
(
black
) models after each
other-loop for the regular case
with the overfit (
solid
)andthe
constrained (
dashed
) methods
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
1
2
3
4
Outer−Loop Number
one-half of the values found in Fig.
10.2
as a conservative measure of the time
window (
for the regular case). Because the Lorenz63 system state
contains only three state variables, the Kalman matrix (
10.8
) was computed directly
rather than employ a gradient-descent inner-loop.
For each ensemble member, the linearity is estimated similar to that shown
in Fig.
10.1
, but scaled by the observational error,
R
, because this provides an
estimate of the errors expected in the fit (including nonlinearity). Any member with
a linearity error greater than 10 % of
R
is thrown out. This insures that only weakly
nonlinear ensemble members are compared. For all cases, at least 200 members
passed this criterion. Because the distribution of the ensemble member trajectories
is not Gaussian, for all remaining discussion (unless noted) the median of the valid
ensemble members is used to represent the entire ensemble. Ensembles using 3, 6,
9, 12, 15, 18, and 21 observations were created.
The cost functions (Eq.
10.4
) for each ensemble member upon completion of
each outer-loop, normalized by the initial guess are computed to compare the
behavior of each outer-loop. The ensemble median cost-functions for the three
observation case are shown in Fig.
10.3
. Because the overfit method constrains only
the residuals and ignores the background constraint, it significantly under-estimates
the cost function. In both the regular and transition (not shown as it is similar) cases,
the overfit method significantly reduces the linear cost function through each outer-
loop. After the second inner-loop, most further reduction is accomplished against
the background constraint,
t
D
Œ0;1:9
J
b
, term. The overfit method considers only the current
increment weighted by
P
rather than the total increments over all inner-loops. The
constrained case shows little improvement after the first outer-loop, and after the
second outer-loop, it has converged.
It is expected that overfitting the observations would degrade the forecasting
ability of the model. Using the true (unperturbed) trajectory, a new cost function
A
D
.
x
x
t
/
T
S
1
.
is computed every 0.05 time units of the window. The
diagonal error matrix
S
is composed of the prescribed random observational error.
x
x
t
/































Search WWH ::

Custom Search