Geoscience Reference
In-Depth Information
54
°
W
52
°
W
50
°
W
54
°
W
52
°
W
50
°
W
20
°
N
20
°
N
18
°
N
18
°
N
o
o
p
p
16
°
N
16
°
N
Prior Variance
Kalman Variance
54
°
W
52
°
W
50
°
W
54
°
W
52
°
W
50
°
W
20
°
N
20
°
N
18
°
N
18
°
N
o
o
p
p
16
°
N
16
°
N
Quadratic Variance
Particle Variance
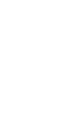
Fig. 7.7
Estimates of the posterior error variance for Hurricane Katia (2011). In each panel the
contour interval is
mb
2
at intervals of 10, except for the particle filter which is
mb
2
at
0
-
80
0
-
16
intervals of 2
of moderate value this example is most consistent with Fig.
7.4
f from the idealized
examples. Recall that in Fig.
7.4
f the location of the posterior mean was also not
centered on the position observation location, but rather was located approximately
halfway between the observation location and the prior mean location. Similarly,
note that the EnKF estimate in Fig.
7.5
b is shifted less towards the prior mean
location than when compared with that of the particle filter, and includes a small
“high” to the Southwest of the prior mean location. This small high can be seen in
the ridging to the Southwest of the prior mean location and also in the very flat
appearance of the contours on the Southwest side of the TC. Again, recall that
these features of the Kalman estimate were also seen in Fig.
7.4
f. In contrast, the
Quadratic Ensemble Filter estimate of the posterior mean is very close (in both
position and structure) to that of the true posterior mean, which is again very similar
to that of Fig.
7.4
f.
In Fig.
7.7
a is shown the prior error variance. The prior error variance has a
single maximum in the vicinity of the prior mean location. In contrast, the true











































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Search WWH ::

Custom Search