Geoscience Reference
In-Depth Information
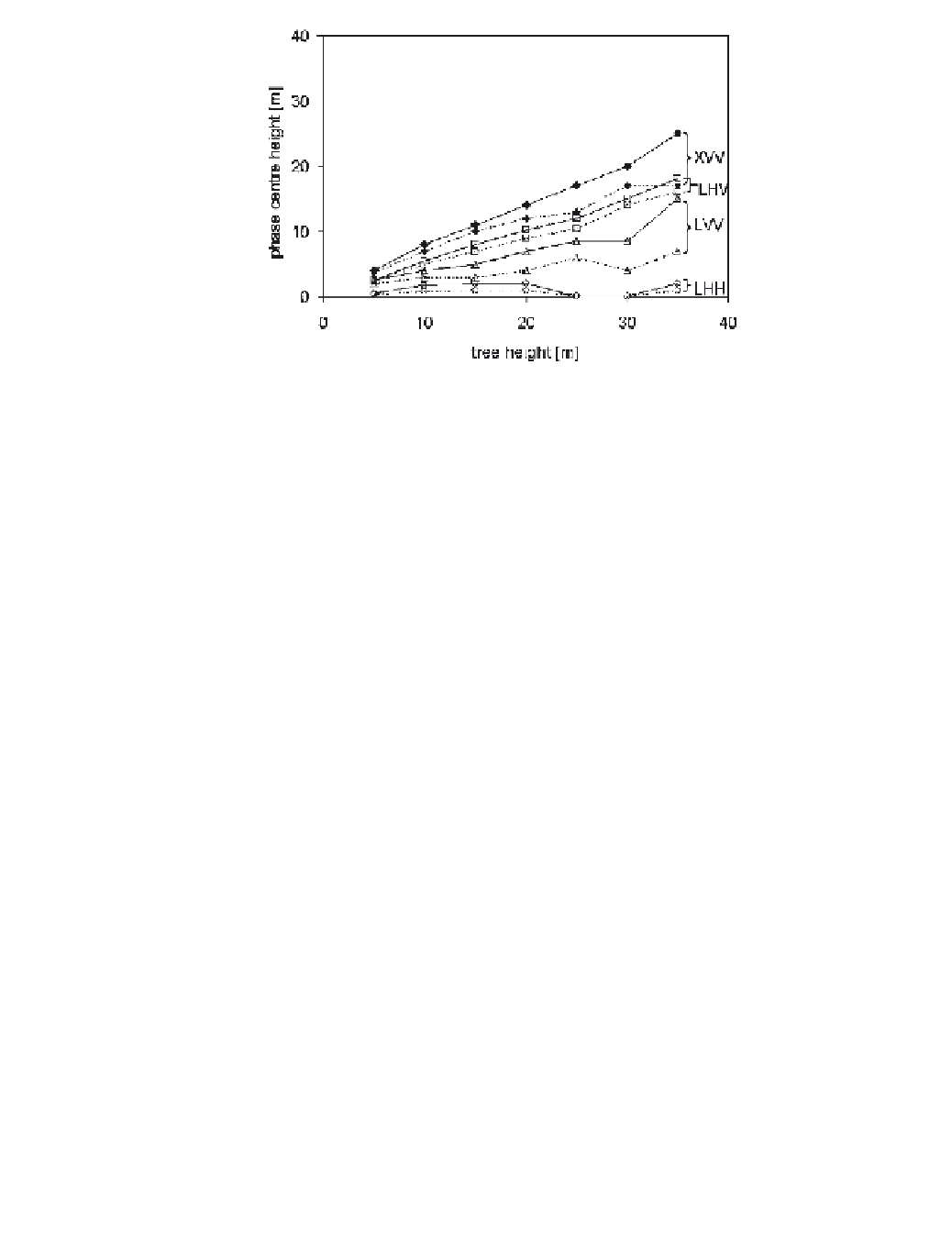
Figure 19.1
Scattering phase centre height at X-band VV polarization and L-band
HH, HVand VV polarization (H
=
horizontal, V
=
vertical) from the coherent microwave
model CASM for tree densities of 1000 (dotted lines) and 2000 ha
−
1
(solid lines) at 45º
incidence angle. The maximum phase centre separation is between the phase centres
of X-VV and L-HH. Reprinted from Balzter, H., Rowland, C.S., and Saich, P (2007b):
'Forest canopy height and carbon estimation at Monks Wood National Nature Reserve,
UK, using dual-wavelength SAR interferometry',
Remote Sensing of Environment
, 108,
224-239, copyright (2007), with permission from Elsevier.
mating forest canopy height because from the phase at different wavelengths and
polarizations the underlying terrain height and vegetation canopy height can be
derived (Balzter et al., 2007a; Balzter et al., 2007b). Because SAR is an active remote
sensing technique, it is able to acquire imagery at night-time, including at high lati-
tudes during the polar winter.
Light detection and ranging (LiDAR)
Light detection and ranging is an active technique based on emitting infrared radia-
tion from the sensor to the surface and then measuring the time it takes until a
signal is received. If the target is a forest site then the signal will stem from a range
of vegetation components at different heights in the canopy, and a full pulse of
returns can be recorded by more advanced sensors. Of particular interest is often
the fi rst and last return since they are correlated to the highest and lowest point
within the LiDAR footprint. Airborne laser scanning (or Imaging LiDAR) is a very
accurate method for mapping topographic and vegetation height. It has been exten-
sively applied by the Environment Agency in the UK for fl ood defence monitoring
along the coastline and major rivers, for mapping vegetation canopies (Hill et al.,
2002; Hinsley et al., 2002; Gaveau and Hill, 2003; Patenaude et al., 2004; Hill and
Thomson, 2005; Hinsley et al., 2006) as well as building structures in urban areas
(Zhou et al., 2004; Sohn et al., 2005; Luo and Gavrilova, 2006). Ground-based
LiDAR systems can be deployed closer to the target and have mm to cm range reso-
lutions (Henning and Radtke, 2006; Van der Zande et al., 2006; Danson et al.,
2007).