Geoscience Reference
In-Depth Information
tAble 9.6
Currently Achievable GpS Accuracy
positioning Mode
point positioning
(pseudorange)
Relative positioning
PPS
1-5 m
Static survey
(carrier phase)
2 mm (→) plus 1 ppm
a
(up to <0.1 ppm)
SPS, SA off
4-10 m
Kinematic survey
(carrier phase)
5 mm (→)
SPS, SA on
0-100 m
DGPS services
(pseudorange)
50 cm (→)
a
ppm, part per million.
Source:
From Rizos, C., in
Manual of Geospatial Science and Technol-
ogy
, Taylor & Francis, London, 2002. With permission.
Multiple
Channels
Antenna and
Preamplifier
Control and
Interface Unit
Code Tracking
Loop
Micro-
Processor
Data Storage
Rf
Carrier
Tracking Loop
Power Supply
Unit
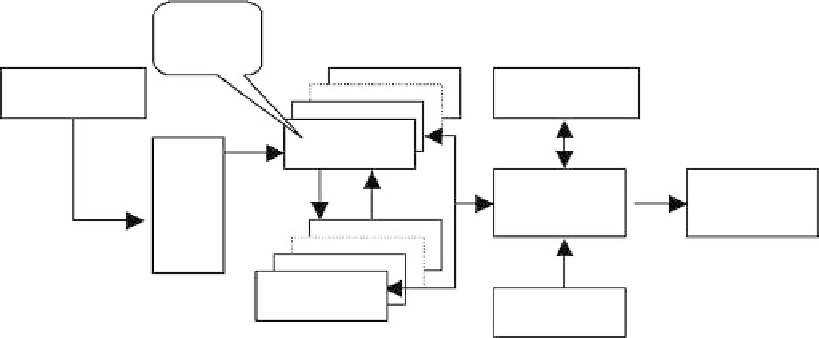
fIGURe 9.18
Basic components of a Global Positioning System (GPS) receiver. (From Grejner-Brzezinska,
D. A., in
Manual of Geospatial Science and Technology
, Taylor & Francis, London, 2002. With permission.)
all GPS receivers essentially the same, apart from functionality and user software?
The general
answer is yes: all GPS receivers support essentially the same functionality blocks, even if their
implementation differs for different types of receivers.
The following are the primary components of a generic GPS receiver (Figure 9.18): antenna
and preamplifier, radio-frequency (RF) front-end section, a signal tracker block, microprocessor,
control/interface unit, data storage device, and power supply (Grejner-Brzezinska, 2002; Langley,
1991; Parkinson and Spilker, 1996). Any GPS receiver must carry out the following tasks:
•
Select the satellites to be tracked based on GDOP and Almanac
*
•
Search and acquire each of the GPS satellite signals selected
•
Recover navigation data for every satellite
•
Track the satellites, measure pseudorange and carrier phase
•
Provide position and velocity information
* A set of parameters included in the GPS satellite navigation message that is used by a receiver to predict the approximate
location of a satellite. The almanac contains information on all of the satellites in the constellation.