Geoscience Reference
In-Depth Information
linear combination must be used (if dual-frequency data are available) to mitigate the effects of the
ionosphere (Hofman-Wellenhof et al., 2001). Single-frequency users are limited to short baselines,
unless differential corrections are provided via DGPS services, as explained in the next section. In
summary, the following are the primary consequences of GPS data differencing:
•
Elimination or reduction of several bias errors
•
Reduction of data quantity
•
Introduction of mathematical correlation among data
•
Increase of the noise level of the differenced data
The primary differential modes are (1) single differencing mode, (2) double differencing mode,
and (3) triple differencing mode. The differencing can be performed between receivers, between
satellites, and between epochs of observations as already mentioned. The single-differenced
(between-receiver)
measurement,
Φ
ij
,
, is obtained by differencing two observables to the satellite
k
,
tracked simultaneously by two receivers
i
(reference) and
j
(user):
ΦΦΦ
ij
k
,
=−
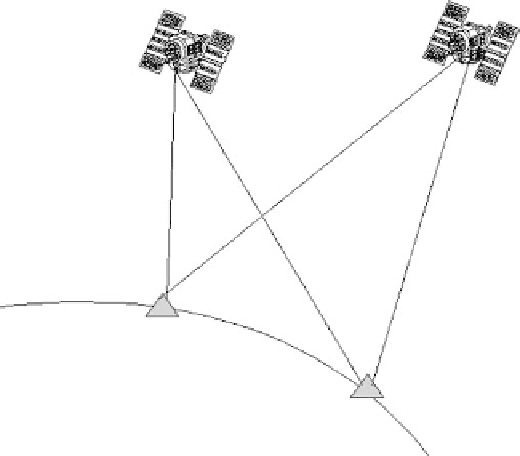
(see Figure 9.11)
.
By
differencing observables from two receivers,
i
and
j
, observing two satellites,
k
and
l
, or simply by dif-
ferencing two single differences to satellites
k
and
l
, one arrives at the double-differenced
(between-
receiver/between-satellite
k
k
k
i
j
kl
,
k
k
l
l
k
l
=−−+=−
. Double difference is the most commonly used differential observable. Furthermore, differenc-
ing two double differences, separated by the time interval
dt = t
2
− t
1
,
renders triple-differenced
measurement, Φ
differencing)
measurement: Φ ΦΦΦΦΦΦ
ij
,
i
j
i
j
ij
,
ij
,
kl
,
kl
,
kl
,
= −
2 1
, which in case of carrier phase observables effectively
cancels the initial ambiguity term. Differencing can be applied to both pseudorange and carrier
phase. However, for the best positioning accuracy with carrier phase double differences, the initial
ambiguity term should be first resolved and fixed to the integer value. Relative positioning may be
performed in static and kinematic modes, in real time (see the next section), or for the highest accu-
racy, in postprocessing. Table 9.3 shows the error characteristics for between-receiver single and
between-receiver/between-satellite double differenced data.
Basic pseudorange and carrier phase Equation (9.1) through Equation (9.3) represent the func-
tional relationships between the true observations and the underlying parameters. However, the
observations (and models involved) are not perfect; thus, the functional models require a respective
()
dt
Φ
()
t
Φ
()
t
ij
,
ij
,
ij
,
Satellite
k
Satellite
l
Φ
i
Φ
i
Φ
j
Φ
j
Base (reference) receiver at
known location,
i
Receiver at unknown
location,
j
fIGURe 9.11
Between-receiver between satellite phase-range double differencing.