Geoscience Reference
In-Depth Information
Ultrasonic
emitter
2
πν
0
c
→
1
→
→
q
scat
=
(
n
n
0
)
Water:
D
=30
μ
m
u
→
→
0.8
n
0
,
ν
0
Glycerol:
D
= 430
μ
m
u
n
→
0.6
θ
scat
0.4
Ultrasonic
receiver
0.2
0
Jet nozzle
0
1
2
3
τ
/
τ
η
4
5
6
Receiver 1
Emitter 1
Emitter 2
1
R
λ
= 590
815
950
1050
(
Receiver 2
0.9
0.8
)
-2/3
D
/
η
y
0.7
k
22
x
0.6
k
12
α
0.5
z
k
21
k
11
0.4
0.3
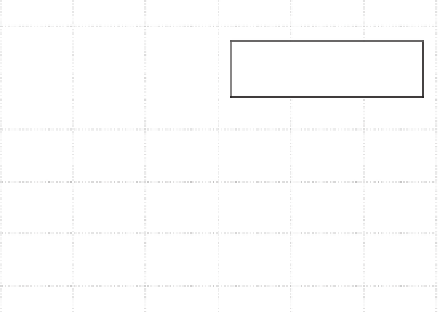
Figure 15.8.
Top: Principle of one-component acoustic
Doppler velocimetry. Note the analogy with the optical sys-
tem used for the ELDV (see Figure 15.5). Bottom: Example of
transducer arrangement for the acoustic Lagrangian tracking of
the three components of the velocity. Four transducers (two
emitters and two receivers) are placed at the vertices of a square,
tilted so that their axes cross at the same point on the jet axis, in
a square-based pyramid configuration. The two emitters operate
at two different working frequencies
ν
0,1
and
ν
0,2
and receivers
listen to scattered waves in the vicinity of each of these frequen-
cies.This arrangement is composed of four independent pairs
of emitters-receivers capable of measuring four projections of
the velocity, which gives a redundant 3D measurement, where
redundancy improves the signal-to-noise ratio (SNR). Adding
extra transducers would increase further the SNR.
0.2
0.1
0
10
20
30
40
50
D
/
η
Figure 15.7.
Top: Acceleration autocorrelation function
C
aa
(τ )
=
a
2
a(t)a(t
+
τ)
/
measured with ELDV in a fully
developed turbulent
flow. For both curves,
time has been
√
ν/
.(
rescaled by the dissipative time
τ
η
) The 30
μ
m
fluorescent tracer particles for a water flow with dissipation
scale
η
=19
μ
m.
=
◦
) Large 430
μ
m polystyrene particles
behaving as tracers in the same (water-glycerol) flow with dissi-
pation scale
η
=90
μ
m. For the two situations, the large-scale
driving and dissipation
= 20 W/kg are the same. Bottom:
Acceleration variance of particles with size
D
normalized by
the one measured for tracers as a function of the ratio
D/η
.
Particles with size
D/η >
5 no longer behave as tracers of the
flow motions.
(
−
ν
0
with a propagating direction
n
0
. Whenever a particle
crosses the acoustic beam of the emitter, it scatters the
acoustic wave. An acoustic receiver then listens to the
scattered wave in a specifc direction
n
s
is
the scatter angle). The intersection between the emitting
and the receiving beams defines the measurement volume,
where particles can be actually detected. Because the par-
ticles moves, the scattered wave is Doppler shifted and its
frequency
ν
s
differs from
ν
0
so that
ν
s
−
n
s
(
θ
s
=
n
0
;
15.3.1. Acoustic Doppler Lagrangian Tracking
15.3.1.1. Principle.
Acoustic Lagrangian tracking is
based on the measurement of the Doppler shift of
the acoustic wave scattered by a moving particle.
Figure 15.8 (top) shows the principle of one-component
ultrasonic Doppler velocimetry. An acoustic transducer
emits a continuous ultrasonic wave at a given frequency
c
sin
θ
s
,
=
V
ν
0
·
(
n
0
−
n
s
)
2
v
//
=
−
(15.4)
ν
0
c
2