Geoscience Reference
In-Depth Information
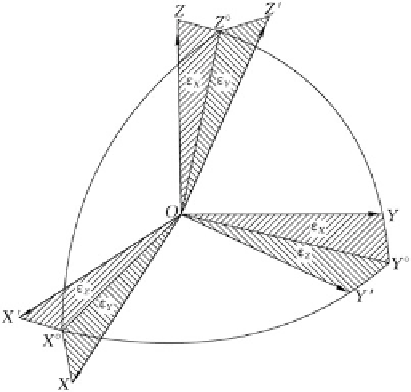
Fig. 7.2 Euler angles
Euler angles are usually described as shown in Fig.
7.2
. Assign ʵ
X
, ʵ
Y
, and ʵ
Z
as
Euler angles, and the rotations of the coordinate system are as follows:
First, rotate OX
0
to OX
and correspondingly OY
0
to OY
around the OZ
0
axis by
ʵ
Z
. Then rotate OZ
0
to OZ
around the OY
axis, and corre-
spondingly OX
to OX, and the rotation angle is
the rotation angle of
ʵ
Y
. Finally, rotate OZ
to axis OZ
around the OX axis; OY
is correspondingly rotated to OY, and the angle of rotation
is
ʵ
X
.
Hence, we can write:
2
3
2
3
X
0
Y
0
Z
0
X
Y
Z
4
5
ᄐ
4
5
,
R
X
ʵðÞ
R
Y
ʵðÞ
R
Z
ʵðÞ
ð
7
:
4
Þ
where R
X
(
ʵ
X
), R
Y
(
ʵ
Y
), and R
Z
(
ʵ
Z
) are the rotation matrices, and the expressions are
given by:
2
4
3
5
9
=
1
0
0
R
X
ʵðÞᄐ
0
cos
ʵ
X
sin
ʵ
X
0
sin
ʵ
X
cos
ʵ
X
2
4
3
5
cos
ʵ
Y
0
sin
ʵ
Y
R
Y
ʵðÞᄐ
:
ð
7
:
5
Þ
0
1
0
;
sin
ʵ
Y
0
cos
ʵ
Y
2
4
3
5
cos
ʵ
Z
sin
ʵ
Z
0
R
Z
ʵðÞᄐ
sin
ʵ
Z
cos
ʵ
Z
0
0
0
1
Substituting (
7.5
) into (
7.4
) yields:
Search WWH ::

Custom Search