Database Reference
In-Depth Information
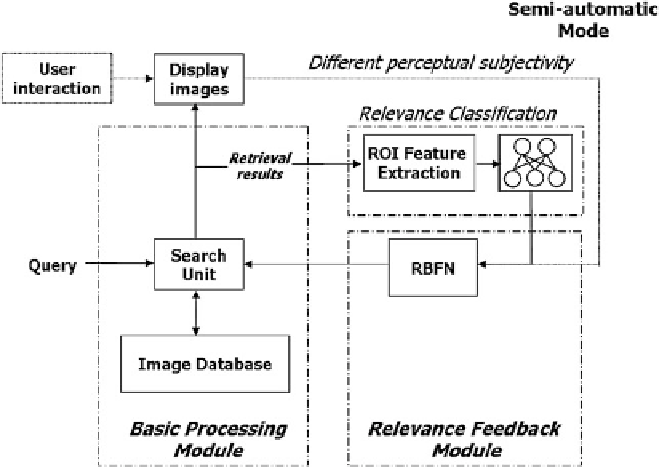
Fig. 3.11
Diagram of an automatic adaptive image retrieval system which utilizes feature sets
extracted from the region-of-interest for pseudo labeling by the SOTM. The system can run in
automatic as well as semiautomatic modes
followed by extracting the feature vectors in the feature space
F
2
, using color
histograms and Fourier descriptors.
The performance comparisons were conducted using four methods: non-adaptive
method, user-controlled RF, automatic RF, and semi-automatic RF, using 20
queries from different categories. The non-adaptive method employed normalized
Euclidean distance as the matching criterion. This method provided a set of retrieved
images to the user-controlled RF algorithm that further enhanced the system
performance by the non-linear RBF model. In comparison, in automatic RF case,
the relevance identification was executed by the SOTM with two iterations of
pseudo-RF. In addition, after the automatic process, the system performance was
refined by a user to obtain semi-automatic RF results.
Table
3.6
presents results obtained by the four methods, measured by the
average precisions of the top 16 best matches. Evidently, the automatic RF provides
considerable improvement over the non-adaptive method (i.e., by more than 25 %
in precision), without user interaction. The automatic result is close to 4 % lower
than that of user-controlled RF method. By combining automatic learning with user
interaction, it is observed that the semi-automatic RF clearly outperforms other
methods discussed.
The user interaction process was also allowed to continue until convergence.
It is observed that the user-controlled RF and the semi-automatic RF reached
convergence at similar points within 93 %. However, in order to reach this optimum
Search WWH ::

Custom Search