Database Reference
In-Depth Information
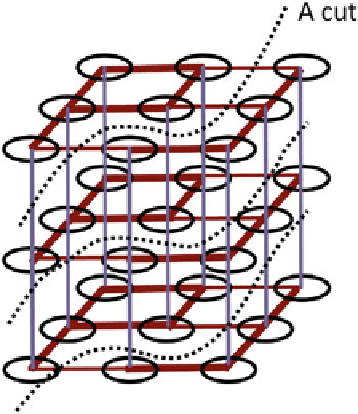
Fig. 7.10
3-D lattice
topology
7.4.3
Histogram of Oriented Gradients
In the calculation of pairwise luminance difference, a pixel can be connected to 4 or
8 of its immediate neighbors. The number of connections is set to reduce processing
complexity, and it is possible to connect a pixel not only to its adjacent pixels, but
also to nearby pixels or pixels which are frames away.
To calculate the HOG feature on a detection window, two basic steps are taken:
(1) divide the window into small spatial regions, (2) calculate the histogram of
gradient directions over the pixels in that cell. For the task of human detection,
HOG is tiled over the detection window in variable scales and the combined feature
vector is used for human detection using a trained classifier.
HOG can not only be used for detecting humans, but any type of objects, as it is a
robust scale-invariant feature. In the current work, each detection window is divided
into cells of size 8
×
8 pixels, with each cell containing a 9-bin HOG and each group
of 2
2 cells is integrated into a block. Each block is thus a 36-D feature vector.
Equations (
7.23
) and (
7.24
) explained below are used to incorporate shape
prior information from the calculated HOG features.
R
p
(
×
O
)
now contains an extra
weighted term ln
P
representing how likely there is an object
O
p
there. is
calculated using a specific trained HOG model.
(
O
p
)
⊧
⊨
0
∈
K
p
O
R
p
(
O
)=
∈
(7.23)
p
B
⊩
(
)
∈
∪
μ
P
O
p
p
O
B
Search WWH ::

Custom Search