Database Reference
In-Depth Information
0.5
wo GPS context
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
wo GPS context
0.4
0.3
0.2
O-gest (binary weight)
alpha=1, beta=1
alpha=2.5, beta=1
alpha=5, beta=1
alpha=50, beta=10
O-gest (binary weight)
alpha=1, beta=1
alpha=2.5, beta=1
alpha=5, beta=1
alpha=50, beta=10
0.1
0.0
3
5
6
9
10
12
3
5
6
9
10
12
Top
N
Top
N
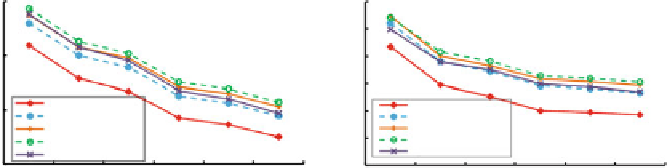
Fig. 4.12
Image contextual-based recognition by various parameter
ʱ
and
ʲ
, without GPS
information
0.85
0.96
w GPS context
w GPS context
0.95
0.80
0.94
0.93
O-gest (binary weight)
alpha=1, beta=1
alpha=2.5, beta=1
alpha=5, beta=1
alpha=50, beta=10
O-gest (binary weight)
0.75
0.92
alpha=1, beta=1
alpha=2.5, beta=1
alpha=5, beta=1
alpha=50, beta=10
0.91
0.70
0.90
3
5
6
9
10
12
3
5
6
9
10
12
Top
N
Top
N
Fig. 4.13
Image
contextual-based
recognition
by
various
parameter
ʱ
and
ʲ
,
with
GPS
information
0.4
0.6
wo GPS context
wo GPS context
0.5
0.3
0.2
0.4
0.1
0.3
original image
alpha=5, beta=1
alpha=40, beta=10
cirm: dx=10, dy=10
cirm: dx=0.0001, dy=0.0001
original image
alpha=5, beta=1
alpha=40, beta=10
cirm: dx=10, dy=10
cirm: dx=0.0001, dy=0.0001
0
0.2
3
5
6
9
10
12
3
5
6
9
10
12
Top
N
Top
N
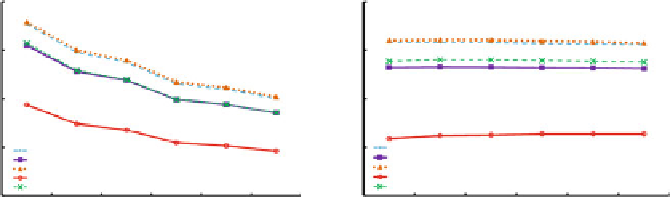
Fig. 4.14
Comparison of image contextual-based recognition by various parameter ʱ and ʲ , with
the conventional CBIR (original), as well as the CIRM algorithm with parameter
dX
and
dY
,
without GPS information
1
1
tf
q
∝
min
(
x
i
))
,
x
r
))
)
1
+
ex p
(
ʴ
X
(
x
l
−
1
+
ex p
(
ʴ
X
(
x
i
−
1
1
∗
min
(
+
ex p
(
ʴ
Y
(
y
t
−
y
i
))
,
+
ex p
(
ʴ
Y
(
y
i
−
y
b
))
)
(4.10)
1
1
where
x
l
,
x
i
,
x
r
represent
x
pixel values of the left boundary, detected feature point,
and the right boundary along the x-axis direction, respectively. Similarly,
y
t
,
y
i
,
y
b
are the
y
pixel values of the top boundary, detected feature point, and the bottom
boundary along the y-axis, respectively. The geometric relations
x
l
<
x
i
<
x
r
and




Search WWH ::

Custom Search