Image Processing Reference
In-Depth Information
input object has been completely different in its position and orientation; however, the pro-
posed matching algorithm is overcome that and succeeded. In fact, all other objects have been
matched by the same way and have achieved 100% for that image.
Table 1
The Matching Process of Objects' Signatures
Table 2
presents error values for another image in the matching process based on objects'
signatures, which are applied on unclear image in
Figure 2(d)
.
As in
Table 1
, all cell's values
represent the DIF of Equation
(5)
, and the least value indicates to exact match of objects in an
image and the input one. Clearly, as seen one mismatching is found in second row column
two; however, this mismatching is acceptable because the objects in second and third columns
are so close to each other in shape.
Table 2
The Matching Process of Objects' Signatures
As the same way in
Tables 1
and
2
, all other objects have been selected based on their signa-
tures and have achieved 96% in the matching process. On the other hand, by applying SURF
on the same image with different input objects, some mismatching is found if the input ob-
ject has changed in his position or orientation; even so, this mismatching has not happened
with the proposed algorithm under the same constraints.
Figure 4
illustrates SURF Work in
an example for this mismatching with the second object in second column of
Table 1
by 100
strongest feature points.
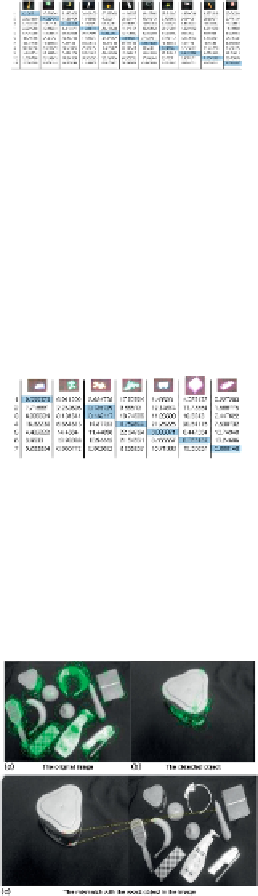
FIGURE 4
The SURF example with the mismatch an object. (a) The original image; (b) the
detected object; (c) the mismatch with the exact object in the image.











Search WWH ::

Custom Search