Image Processing Reference
In-Depth Information
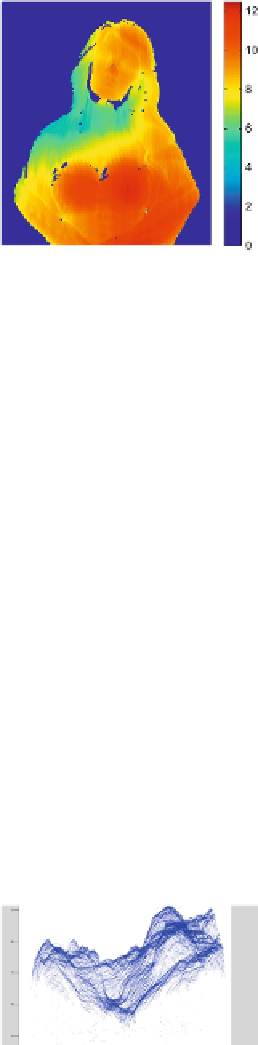
FIGURE 24
Colored depth map.
imshow(dpf,[])
colormap(jet(256));
colorbar
6.8 Convert Differential Phase to Depth and 3D Visualization
SC is scale factor to convert pixel value (phase) to depth (pixel unit).
[x,y]=meshgrid(xmin:xmax,ymax:-1:ymin);
x=x(dpf~= 0);
y=y(dpf~= 0);
z=dpf(dpf~= 0)*SC;
6.9 Accuracy Evaluation of 3D Point Cloud
Previously [
1
,
12
,
13
]
, the level of preciseness in the cloud point was revealed by direct observa-
tion of 3D visualizations. Here, cloud points are converted to inputs suitable for a 3D printer
and precision is judged by comparison of the object printed with the original object that was
to be reconstructed.
A variety of 3D mesh reconstructed models of the woman were created based on point
version of “Geomagic” software. Many other programs are also capable of reading 3D (point
cloud) file formats, for example, Microstation Point Cloud tools, Arc GIS Cloud Extension, and
Mesh Lab to name a few. These applications are capable of providing the function to convert
point clouds to many kinds of 3D models (e.g., wired mesh, 3D mesh) that can be used in ap-
plications with varying demands.
FIGURE 25
Woman sculpture point cloud created by Matlab.
Geomagic was used to create a 3D file in .stl format, a format that is supported by most of
the mentioned point cloud analyzing applications and that can be read by a 3D printer. The
workspace of the 3D printer (the cavity into which objects to be printed are placed) is limited
and it could not house the original sculpture of the woman if we wanted to print it directly. A
Search WWH ::

Custom Search