Image Processing Reference
In-Depth Information
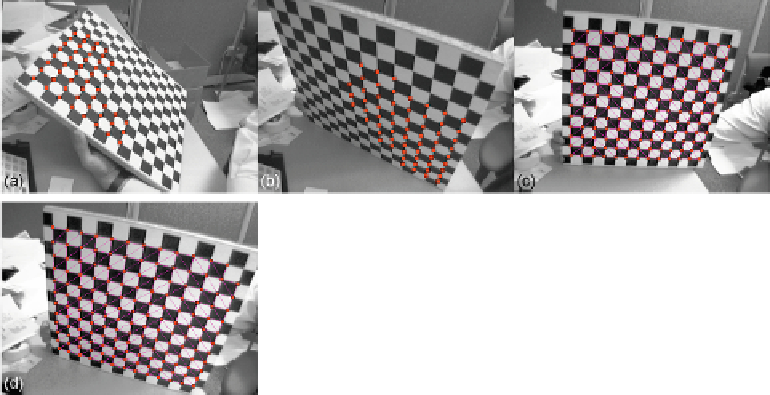
FIGURE 7
Worst (images 5 and 18) and best (images 13 and 17) result in the Bouguet data-
base. (a,b) In images 5 and 18, few points are found due to pattern inclination. (c,d) In images
13 and 17, the pattern is fully detected.
In general, the algorithm was able to find the most calibration points. If the two worst im-
ages are discarded, the accuracy of success rises to 90.88%, which reflects the efficiency of the
methodology. The absence of some points in the final result does not mean they were not de-
tected. Both the presence of a false calibration point as the loss of a filter response inluences
on the neighborhood of these points. From a calibration perspective, where the presence of
outliers affects substantially the camera parameters, it is more prudent to consider only those
points that perfectly match with the regularity of the patern.
For the online experiments, two different cameras were used: (1) Philips Webcam
SPC990NC e and (2) Microsoft Webcam HD 5000. The calibration patern used is formed by
squares with 2.5 cm of width and forms a matrix of 11 × 7 x-corners. For each camera were
tested 14 real images of the calibration patern in various orientations and distances.
The algorithm runs on a sequence of captured frames. The amount of detected points
presented in the second and fourth column of
Table 2
corresponds to the average of the points
detected in 10 frames for each position of the calibration patern.
Search WWH ::

Custom Search