Image Processing Reference
In-Depth Information
FIGURE 7
First image: Curves before alignment, Second image: Curves after alignment.
Table 3
The Estimated Motion's Parameters
Rotation (°) Scaling Difference Between Starting Points
− 0.802
1.571
1.312
We end this part of experiments by applying the active contour with shape prior to object
tracking. In
Figure 8
, the goal is to track the mouse in a video sequence with clutered back-
ground. We suppose that the movement of the mouse through frames is rigid thus the presen-
ted method of shape alignment is used. The convergent contour in frame
i
is used as a tem-
plate in frame
i
+ 1.
FIGURE 8
Tracking of the mouse in video sequence. First row: The active contours model
without shape prior. Second row: The active contours model with shape prior.
Results seem to be satisfactory. Although, the presented rigid motion estimation method
solves some situations and leads to interesting detection results. Other types of transforma-
tions such as stretching can only be solved by the class of relevant transformations. Thus the
goal of the next section is to present some obtained results within this framework.
4.2.2 Case of affine transformation
database (url:
htp://vision.ece.ucsb.edu/zuliani/Research/MCD/MCD.shtml
)
. The (b) image is
the object of interest which is obtained from (a) after affine transformation and partial occlu-
sion. As a first step, we perform object (b) segmentation without prior knowledge. The ob-
tained contour is then aligned with the contour of the (a) object to determine the regions of oc-
clusions. We present in (c) the result of shape alignment. The estimated values are
α
= 2,
l
0
= 0,
We considered in this experiment four templates (a spider, a chopper, a device, and a bird),
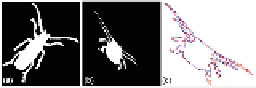
FIGURE 9
Spider's shapes alignment.









Search WWH ::

Custom Search