Image Processing Reference
In-Depth Information
2.1 3D Model Acquisition
The Universidad Nacional de Colombia Sede Manizales has a 3D digitizer VIVID 9i Konica
ation. Since range images cover the object's geometry from a specific point of view, several
shots are needed in order to reconstruct a whole model without occlusions.
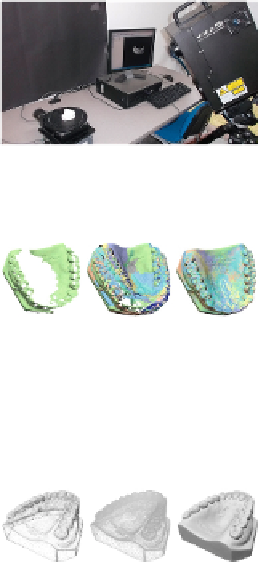
FIGURE 1
Konica Minolta VIVID 9i 3D digitizer.
The views acquired with the range scanner must be aligned up into a single coordinate
FIGURE 2
Registration.
Once the views have been registered, the integration process starts. The goal of integration
is to generate a well-defined mesh or data set using the information coming from all the views
seeks to eliminate redundant information in regions with litle variation in the surface, and to
ill small holes in the surface.
FIGURE 3
Integration.
In this study five dental models were used. Eight views were captured in order to construct
each model, with the scanner tilted at 45°, thus achieving good detail within the object of in-
terest. This process was conducted by the research group in Perception and Intelligent Control
3 Point cloud segmentation
In this section, a brief introduction on three different techniques for segmenting point clouds
3.1 RANSAC
The iterative method of RANSAC was proposed by Fischer and Bolles. The technique aims to
estimate the parameters of a mathematical model from a set of observed data using a meth-
od of hypothesis testing. The algorithm is used as a geometric model-based segmentation al-
gorithm, due to its ability to automatically recognize parameterized shapes through the data.
Search WWH ::

Custom Search