Image Processing Reference
In-Depth Information
detection of the skin regions, the luminance component of the colors is used to capture the de-
tails of the face (eyes, nose, lips, eyebrows, beard, etc.). The overall algorithm for face detection
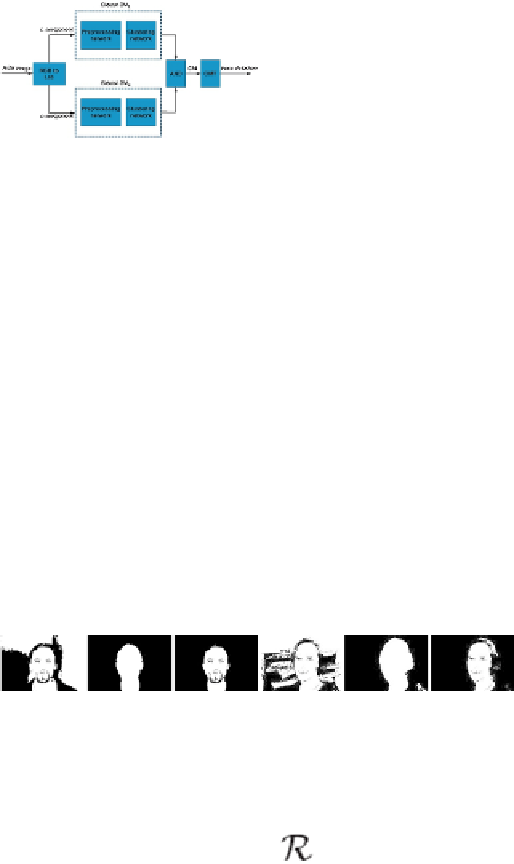
FIGURE 1
Overall face-detection method.
The luminance component
L
and the chrominance components
a
are used to create the skin
map at each pixel (
x
,
y
) as follows:
where SM
L
(
x
,
y
) and SM
a
(
x
,
y
) are obtained as the output of a specialized NN incurred from
the integration of the rough-fuzzy-set-based scale space transform and neural clustering, and
separately applied to the
L
component image, and
a
component image, as depicted in
Figure
1
.
Finally, the skin map SM is fed as input to an algorithm for the detection of elliptical objects,
of CalTech database. It can be observed from the figures that the
a
component identifies the
skin region, while the
L
component is used mainly to obtain the details of the face (eyes, nose,
lips, eyebrows, beard, etc.).
FIGURE 2
L
component,
a
component, and skin map (SM).
3.1 The Proposed Multiscale Method
Let us consider an image as a set
X
of picture elements, i.e., a Cartesian product
[0, …,
N
− 1] × [0, …,
M
− 1].
X
/ is a discretization grid in classes of pixels, such that [
x
]
denotes the class of pixels containing
x
and
μ
is the luminance function of each pixel. Given a
subset
T
of the image not necessarily included or equal to any [
x
] , various approximations
(
RS
−
(
T
) and
RS
−
(
T
)) of this subset can be obtained. As instance, this subset defines the contour
or uniform regions in the image. On the contrary, regions appear rather like fuzzy sets of gray
levels and their comparison or combination generates more or less uniform partitions of the
image. Rough fuzzy sets, and in particular
C
-sets, seem to capture these aspects together, try-
ing to extract different kinds of knowledge in data. In particular, let us consider four different
partitions
Υ
i
,
i
= 1, 2, 3, 4, of the set-image
X
, such that each element of
Υ
i
is a sub-image of di-
mension
w
×
w
and
Υ
2
,
Υ
3
,
Υ
4
are taken as shifted versions of
Υ
1
in the directions of 0 °, − 45 °,



Search WWH ::

Custom Search