Global Positioning System Reference
In-Depth Information
GPS C/A
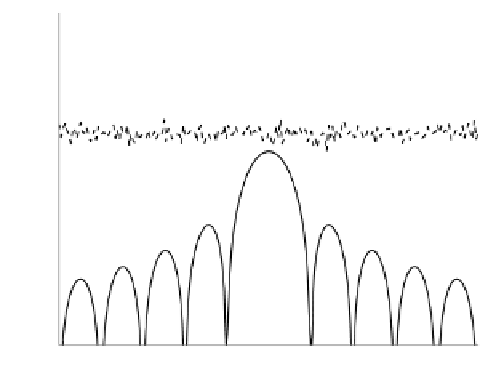
Noise floor, 2 MHz BW
RF filter
−80
−100
−120
≈
−n
dBm
(> −120 dBm)
−140
−160
−180
−5
−1
0
1
5
Frequency [MHz]
FIGURE 4.7. Improved frequency domain depiction. Center frequency 1575
.
42 MHz.
These two factors bring about some, although minimal, structure from the satel-
lite signal spectrum into the frequency domain representation of the collected
data.
For the most part, the data indeed resemble thermal noise, and all the traditional
GNSS signal processing is required to acquire, track, and utilize the navigation
transmission.
4.4
GNSS Front-End ASIC
The final section of this chapter presents the current state of the art for GNSS
front-end designs. The implementation in Figure 4.2 has been built from expen-
sive discrete components. Although this provides a high-quality front-end suitable
for a lab instrument or environment, the cost for such an implementation can ap-
proach $5000. With the cost of handheld GPS receivers now well below $100, an
alternative to such a design must exist.
The solution comes in the form of an integrated circuit. The bulk of the func-
tionality of Figure 4.2 has been incorporated by multiple vendors into an ASIC
that is typically smaller than 5
5 mm packages and utilizes less than 50 mW; see
SiGe SE4110L, Nemerix NJ1006, and Texas Instruments TRF5101 data sheets.
Such components strive to be as completely self-contained as possible, requiring
only a minimal number of external components.
For example, consider the block diagram for the SiGe SE4110L component
shown in Figure 4.8. This is an excellent example of a GPS front-end ASIC com-
ponent. The complete data sheet for the SE4110L is included on the bundled
DVD.
×










Search WWH ::

Custom Search