Global Positioning System Reference
In-Depth Information
|
(
)
|
H
f
|
H
(
f
)
|
max
1
√
2
|
H
(
f
)
|
max
3 dB bandwidth
f
Stop Band
Passband
Stop Band
Transition
Band
Transition
Band
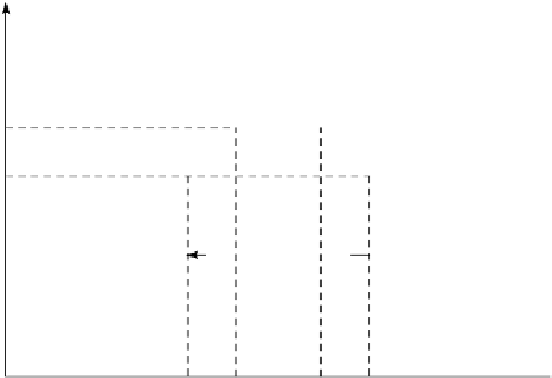
FIGURE 1.11. Parameters of a filter.
The convolution in the time domain corresponds to the multiplication of Fourier
transforms in the frequency domain. Thus, for the system under consideration the
Fourier transforms of the input and output signals are related to each other by
Y
(
f
)
=
H
(
f
)
X
(
f
).
(1.22)
In general, the transfer function
H
(
f
)
is a complex quantity and can be expressed
in magnitude and angle form as
)
=
H
)
e
j
arg
(
H
(
f
))
.
H
(
f
(
f
The quantity
|
H
(
f
)
|
is called the amplitude response of the system, and the quan-
tity arg
is called the phase response of the system. The magnitude response
is often expressed in decibels (dB) using the definition
H
(
H
(
f
))
dB
=
20 log
10
H
.
(
)
(
)
f
f
We mention in passing that in real systems
h
(
t
)
is a real-valued function and hence
H
∗
(
−
.
If the input and output signals are expressed in terms of power spectral density,
then the input-output relation is given by
H
(
f
)
has conjugate symmetry in the frequency domain, i.e.,
H
(
f
)
=
f
)
H
2
S
x
(
S
y
(
f
)
=
(
f
)
f
).
The equations above show that an LTI system acts as a filter. Filters can be classi-
fied into lowpass, bandpass, and highpass filters and they are often characterized
by stopbands, passband, and half-power (3 dB) bandwidth. These parameters are
identified in Figure 1.11 for a bandpass filter.

Search WWH ::

Custom Search