Global Positioning System Reference
In-Depth Information
x
(
t
)
t
0
x
δ
(
t
)
...
...
t
0
T
s
2
T
s
3
T
s
4
T
s
5
T
s
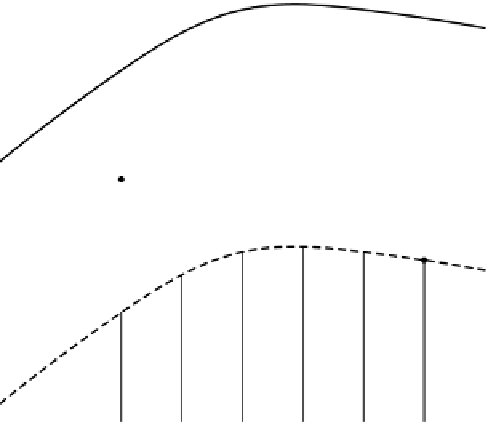
FIGURE 1.7. Sampling operation shown in the time domain. Top: Signal
x
(
t
)
. Bottom:
Sampled signal
x
δ
(
t
)
.
Figure 1.9 shows a block diagram of a system characterized by a function
f
and
with input signal
x
.
By means of the properties of the input-output relationship given in (1.17), we
can classify systems as follows:
(
t
)
and output signal
y
(
t
)
Linear and nonlinear systems
A system is said to be linear if superposition ap-
plies. That is, if
f
x
1
(
)
f
x
2
(
)
,
y
1
(
t
)
=
t
and
y
2
(
t
)
=
t
then
)
.
A system in which superposition does not apply is termed a nonlinear sys-
tem.
f
a
1
x
1
(
a
1
y
1
(
t
)
+
a
2
y
2
(
t
)
=
t
)
+
a
2
x
2
(
t
Time-invariant and time-varying systems
A system is said to be be time-invariant
if a time shift in the input results in a corresponding time shift in the output.
That is,
f
x
)
,then
y
f
x
t
0
)
for
if
y
(
t
)
=
(
t
(
t
−
t
0
)
=
(
t
−
−∞
<
t
,
t
0
<
∞
,
where
t
0
is any real number. Systems that do not meet this requirement are
called time-varying systems.



Search WWH ::

Custom Search