Global Positioning System Reference
In-Depth Information
8
6
4
2
0
−2
−4
−6
−8
0
2
4
6
8
10
12
Time [s]
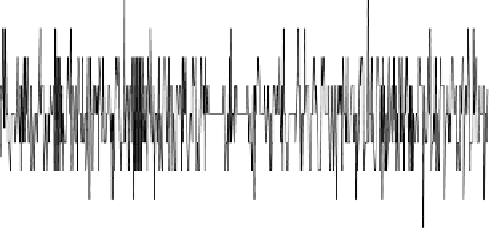
FIGURE 8.7. Correlation of 12 s data with the preamble.
To avoid under- or overflow at the beginning or end of a week, we use the
M
-file
check_t
.
8.4
Pseudorange Estimation
Pseudorange estimations can be divided into two sets of computations. The first
computational method is to find the initial set of pseudoranges, and the second
computational method is to keep track of the pseudoranges after the first set is
estimated. Two computational methods are described below.
8.4.1 The Initial Set of Pseudoranges
To find the initial set of pseudoranges between the receiver and the tracked satel-
lites, at least 12 s of data are needed. When the receiver has collected more than
12 s of data, the data are correlated with the preamble from the TLM word. The
TLM word is located at the start of each subframe. Such a correlation is shown in
Figure 8.7.
The length of the preamble is 8 samples, so if the TLM word is present in
the data, there will be a correlation value of 8. It can be seen in Figure 8.7 that
there is a correlation value corresponding to the preamble twice in the 12 s of
data. This is used to check if it really is a subframe that is found or it were just a
bit combination similar to the preamble. The correlation is carried out for all the
tracked satellites.
After the preamble is identified, the start of a subframe is found for all the
available satellites. In Figure 8.8, the start of the subframes is plotted for four
channels.
It is known that the travel time from the satellites to the Earth is 65-83 ms.
This is used to set the initial pseudorange. The satellite closest to the Earth is
the satellite with the earliest arriving subframe. In this case the satellite in chan-










Search WWH ::

Custom Search