Global Positioning System Reference
In-Depth Information
η
(
−
ae
,
a
)
circle
S
(
−
ae
,
b
)
ξ
S
r
v
0
η
ξ
f
E
•
•
•
perigee
P
center of circle
(
−
center of Earth
C
(
,
)
,
)
ae
0
0
0
(
a
(
1
−
e
),
0
)
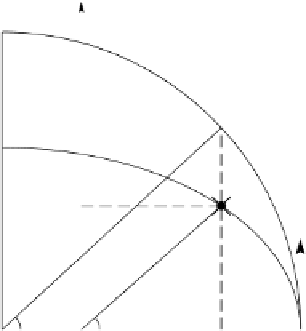
FIGURE 8.6. The elliptic orbit with
(ξ, η)
coordinates. The true anomaly
f
at
C
.
read the eccentric anomaly
E
and the true anomaly
f
. Also, immediately we have
ξ
=
r
cos
f
=
a
cos
E
−
ae
=
a
(
cos
E
−
e
),
a
1
b
e
2
sin
E
η
=
r
sin
f
=
a
a
sin
E
=
b
sin
E
=
−
.
Hence the position vector
r
of the satellite with respect to the center of the Earth
C
is
⎡
⎣
⎤
⎦
=
⎡
⎣
⎤
⎦
.
a
(
cos
E
−
e
)
ξ
η
ζ
a
√
1
r
=
−
e
2
sin
E
0
(8.1)
Simple trigonometry leads to the following expression for the norm:
r
=
a
(
1
−
e
cos
E
).
(8.2)
In general,
E
varies with time
t
while
a
and
e
are nearly constant. (There are
long and short periodic perturbations to
e
, only short for
a
.) Recall that
r
is the
geometric distance between satellite
S
and the Earth center
C
.
For later reference we introduce the mean motion
n
, which is the mean angular
satellite velocity. If the period of one revolution of the satellite is
T
,wehave
=
(
0
,
0
)
GM
a
3
T
2
n
=
=
.
(8.3)
π
s
2
.
This value
shall
be used for computation of satellite positions (based on broadcast
ephemerides), although more recent values of
GM
are available; see Section 8.10.
10
14
m
3
The product
GM
was introduced on page 46 with the value 3
.
986 005
·
/








Search WWH ::

Custom Search