Global Positioning System Reference
In-Depth Information
x 10
4
2
1.5
1
0.5
0
−0.5
−1
−1.5
100
200
300
400
500
600
Time [ms]
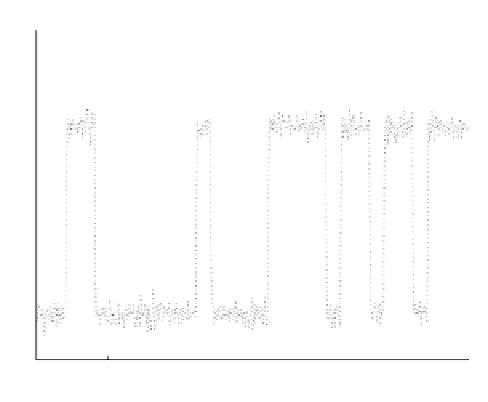
FIGURE 8.1. The figure shows output from the tracking block as dots. The dotted lines
mark the bit transitions 20 ms apart. The actual signal is very strong, as a weaker one will
have dots closer to zero.
8.2
Navigation Data Decoding
The navigation data
encoding
follows a scheme defined in the GPS Interface Con-
trol Document, ICD-GPS-200 (1991). The encoding scheme for Galileo is not
available at the moment of writing.
When the GNSS navigation bits have been obtained through the bit synchro-
nization, they must be
decoded
. The GPS ephemeris parameters are described
below, while the tentative Galileo scheme is described in Section 3.4.
8.2.1 Location of Preamble
The first problem in the GPS navigation data decoding is to determine the location
of the beginning of a subframe. The beginning of a subframe is marked by an
8-bit-long preamble. The pattern of the preamble is
10001011
. Because of the
Costas loop's ability to track the signal with a 180
◦
phase shift, this preamble
can occur in an inverted version
01110100
. Naturally, these two bit patterns can
occur anywhere in the received data so an additional check must be carried out
to authenticate the preamble. The authentication procedure checks if the same
preamble is repeated every 6 s corresponding to the time between transmission of
two consecutive subframes.
The preamble search is implemented through a correlation. The first input to
the correlation function is the incoming sequence of navigation data bits. This
sequence is represented with
1's and 1's. The second input to the correlation
function is the 8-bit preamble also represented with
−
−
1's and 1's. When using
values
−
1 and 1 instead of 0 and 1, the output of the correlation function is 8





























































Search WWH ::

Custom Search