Global Positioning System Reference
In-Depth Information
1
Dot product
Normalized power
Power
Coherent
0.5
0
−0.5
−1
−1.5
−1
−0.5
0
0.5
1
1.5
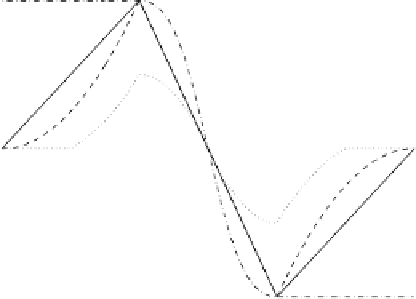
True offset of the two codes [chips]
FIGURE 7.15. Comparison between the common DLL discriminator responses.
Figure 7.15 shows the coherent discriminator and three noncoherent discrimi-
nators using a standard correlator. The figure is produced from ideal ACFs, and
the space between the early, prompt, and late is
1
2
chip. The space between the
early, prompt, and late codes determines the noise bandwidth in the delay lock
loop. If the discriminator spacing is larger than
±
1
2
chip, the DLL would be able to
handle wider dynamics and be more noise robust; on the other hand, a DLL with a
smaller spacing would be more precise. In a modern GPS receiver the discrimina-
tor spacing can be adjusted while the receiver is tracking the signal. The advantage
from this is that if the signal-to-noise ratio suddenly decreases, the receiver uses
a wider spacing in the correlators to be able to handle a more noisy signal, and
hereby a possible code lock loss could be avoided; see Kaplan & Hegarty (2006),
page 175.
The implemented tracking loop discriminator is the normalized early minus
late power. This discriminator is described as
I
E
+
Q
E
)
−
(
I
L
+
Q
L
)
(
D
=
Q
L
)
,
(7.25)
I
E
+
Q
E
)
+
(
I
L
+
(
where
I
E
,
Q
E
,
I
L
,and
Q
L
are output from four of the six correlators shown
in Figure 7.13. The normalized early minus late power discriminator is chosen
because it is independent of the performance of the PLL as it uses both the in-
phase and quadrature arms. The normalization of the discriminator causes that
the discriminator can be used with signals with different signal-to-noise ratios
and different signal strengths.
The tracking loop generates three local code replicas. In this section, the chip
space between the early and prompt replicas is half a chip.
As was described, the DLL can be modeled as a linear PLL and thus the perfor-
mance of the loop can be predicted based on this model. In other words the loop
filter design is the same, just the parameter values are different.
















Search WWH ::

Custom Search