Global Positioning System Reference
In-Depth Information
Correlation results, in−phase arm
3
x
10
7
2
I
E
2
2
I
P
1
2
I
L
20
40
60
80
100
120
Time [ms]
Correlation results, quadrature arm
x 10
7
2
2.5
Q
E
2
2
1.5
Q
P
1
2
Q
L
0.5
20
40
60
80
100
120
Time [ms]
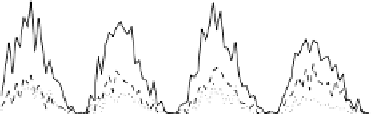
FIGURE 7.13. Output of the six correlators in the in-phase and quadrature arms of the
tracking loop. Acquisition frequency offset is 20 Hz and PLL noise bandwidth is 15 Hz
(for demonstration purpose).
The design in Figure 7.12 has the advantage that it is independent of the phase
on the local carrier wave. If the local carrier wave is in phase with the input signal,
all the energy will be in the in-phase arm. But if the local carrier phase drifts
compared to the input signal, the energy will switch between the in-phase and the
quadrature arm. For demonstration purposes, Figure 7.13 shows such a situation
Correlation results, in−phase arm
x 10
7
12
2
I
E
10
2
8
I
P
6
2
I
L
4
2
20
40
60
80
100
120
Time [ms]
Correlation results, quadrature arm
x
10
7
12
2
Q
E
10
8
2
Q
P
6
4
2
Q
L
2
20
40
60
80
100
120
Time [ms]
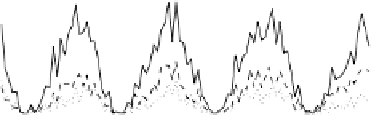
FIGURE 7.14. Output of the six correlators in the in-phase and quadrature arms of the
tracking loop. The local carrier wave is in phase with the input signal.

































































Search WWH ::

Custom Search