Global Positioning System Reference
In-Depth Information
ζ
= 0.3
80
ζ
= 0.5
60
ζ
= 0.7
ζ
= 0.9
40
ζ
= 1.1
20
0
−20
−40
−60
−80
50
100
150
200
250
Time [ms]
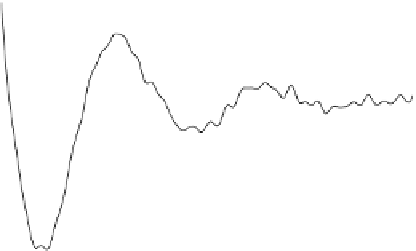
FIGURE 7.4. Phase error as function of different damping ratios
ζ
. A larger settling time
results in a smaller overshoot of the phase.
By substituting (7.12) and (7.13) into (7.14), we obtain the following:
z
−
1
K
o
K
d
C
1
z
−
2
K
o
K
d
(
C
1
+
C
2
)
−
H
2
(
z
)
=
+
K
o
K
d
(
2
z
−
1
z
−
2
.
(7.15)
C
1
+
C
2
)
−
+
(
−
K
o
K
d
C
1
)
1
1
To find an equation for the two coefficients
C
1
and
C
2
, (7.11) and (7.15) are
compared. This yields the following two equations:
1
K
o
K
d
8
ζω
n
T
C
1
=
2
,
(7.16)
4
+
4
ζω
n
T
+
(ω
n
T
)
2
1
K
o
K
d
4
(ω
n
T
)
C
2
=
2
,
(7.17)
4
+
4
ζω
n
T
+
(ω
n
T
)
where
K
o
K
d
is the loop gain,
ζ
is the damping ratio,
ω
n
is the natural frequency,
and
T
is the sampling time; see Chung et al. (1993).
The natural frequency can be found as
8
ζ
B
L
ω
n
=
1
,
(7.18)
4
ζ
2
+
where
B
L
is the noise bandwidth in the loop; see Parkinson & Spilker Jr. (1996),
volume 1, page 371.
The damping ratio and noise bandwidth are computed for a particular signal
case. But in some cases an engineer would like to change these values for specific
applications or implementations. Therefore, a more thorough explanation is given
about these parameters.



























Search WWH ::

Custom Search