Global Positioning System Reference
In-Depth Information
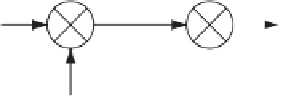
Incoming
signal
Navigation data
Carrier wave replica
PRN code replica
FIGURE 7.1. Basic demodulation scheme. This scheme is used to demodulate the naviga-
tion message.
The output from the front end including filtering and downconversion can be de-
scribed as
s
k
2
P
PL1
P
k
2
P
C
C
k
D
k
D
k
(
t
)
=
(
t
)
(
t
)
cos
(ω
IF
t
)
+
(
t
)
(
t
)
sin
(ω
IF
t
),
(7.2)
where
ω
IF
is the intermediate frequency to which the front end has downconverted
the carrier frequency. Equation (7.2) describes the output of the front end from one
satellite.
This signal is then sampled by the A/D converter. Because of the narrow band-
pass filter around the C/A code, the P code is distorted. In this way the last term
in Equation (7.2) is filtered out and cannot be demodulated and is in the following
described as noise
e
(
n
)
. The signal from satellite
k
after the A/D conversion can
be described as
s
k
C
k
D
k
(
n
)
=
(
n
)
(
n
)
cos
(ω
IF
n
)
+
e
(
n
)
(7.3)
with
n
in units of 1
f
s
s;
n
indicates that the signal is discrete in time.
To obtain the navigation data
D
k
/
from the above signal, the signal has to be
converted down to baseband. The carrier removal is done by multiplying the input
signal with a replica of the carrier as shown in Figure 7.1. If the carrier replica
is identical to the incoming carrier in both frequency and phase, the product of
both is
s
k
(
n
)
C
k
D
k
(
n
)
cos
(ω
IF
n
)
=
(
n
)
(
n
)
cos
(ω
IF
n
)
cos
(ω
IF
n
)
1
2
C
k
D
k
1
C
k
D
k
(7.4)
where the first term is the navigation message multiplied with the PRN code and
the second term is a carrier with the double intermediate frequency. The latter
part of the signal can be removed by applying a lowpass filter. The signal after the
lowpass filter is
=−
(
n
)
(
n
)
−
2
cos
(
2
ω
IF
n
)
(
n
)
(
n
),
2
C
k
D
k
1
(
n
)
(
n
).
(7.5)
Thenextstepistoremovethecode
C
k
from the signal. This is done by
correlating the signal with a local code replica. If the code replica is exactly the
same as the code in the signal, the output of the correlation is
N
(
n
)
−
1
C
k
C
k
D
k
ND
k
(
)
(
)
(
)
=
(
),
n
n
n
n
(7.6)
n
=
0
where
ND
k
(
n
)
is the navigation message multiplied by the amount of points in
the signal
N
.






Search WWH ::

Custom Search