Graphics Reference
In-Depth Information
and
p
=(
x
p
i
+
y
p
j
+
z
p
k
)cos
α
+(
a
i
+
b
j
+
c
k
)(
ax
p
+
by
p
+
cz
p
)
K
bx
p
)
k
]sin
α
p
=[
x
p
cos
α
+
a
(
ax
p
+
by
p
+
cz
p
)
K
+(
bz
p
−
+[(
bz
p
−
cy
p
)
i
+(
cx
p
−
az
p
)
j
+(
ay
p
−
cy
p
)sin
α
]
i
+[
y
p
cos
α
+
b
(
ax
p
+
by
p
+
cz
p
)
K
+(
cx
p
−
az
p
)sin
α
]
j
+[
z
p
cos
α
+
c
(
ax
p
+
by
p
+
cz
p
)
K
+(
ay
p
− bx
p
)sin
α
]
k
p
=
x
p
a
2
K
+cos
α
+
y
p
(
abK
c
sin
α
)+
z
p
(
acK
+
b
sin
α
)
i
+
x
p
(
abK
+
c
sin
α
)+
y
p
b
2
K
+cos
α
+
z
p
(
bcK − a
sin
α
)
j
+
x
p
(
acK − b
sin
α
)+
y
p
(
bcK
+
a
sin
α
)+
z
p
c
2
K
+cos
α
k
−
and the transformation becomes
⎡
⎤
⎡
⎤
⎡
⎤
x
p
y
p
z
p
a
2
K
+cos
α bK
c
sin
αacK
+
b
sin
α
abK
+
c
sin
α
2
K
+cos
α cK
−
x
p
y
p
z
p
⎣
⎦
=
⎣
⎦
·
⎣
⎦
−
a
sin
α
acK
−
b
sin
α cK
+
a
sin
α
2
K
+cos
α
where
K
=1
−
cos
α
.
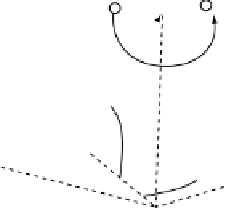
Now let's approach the problem using transforms and trigonometric identities.
Figure 7.25 shows a point
P
(
x
,
y
,
z
) to be rotated through an angle
α
to
P
(
x
,y
,z
) about an axis defined by
v
=
a
i
+
b
j
+
c
k
where
=1.
The transforms to achieve this operation can be expressed as follows
⎡
v
⎤
⎡
⎤
x
y
z
x
y
z
⎣
⎦
=
T
5
×
⎣
⎦
T
4
×
T
3
×
T
2
×
T
1
×
which aligns the axis of rotation with the
x
-axis, performs the rotation of
Pα
about the
x
-axis, and returns the axis of rotation to its original position.
Y
P
P'
a
v
b
q
a
f
Z
c
X
Fig. 7.25.
The geometry associated with rotating a point about an arbitrary axis.