Graphics Reference
In-Depth Information
by
()
=
(
()
()
()
)
pt
,
q
g t g t
,
cos ,
q
g t
sin
q
.
(12.1)
1
2
2
The subset
X
= p([a,b] ¥ [c,d]) Õ
R
3
is called a
surface of revolution
about the x-axis
for angles c to d with respect to g. The curves g(t) = p(t,q) for fixed q are the
meridi-
ans
of the surface of revolution and the curves h(q) = p(t,q) for fixed t are called the
circles of latitude
. If [c,d] = [0,2p], then
X
is called a
full surface of revolution
. The func-
tion p is called the
standard parameterization of
X
with respect to g
.
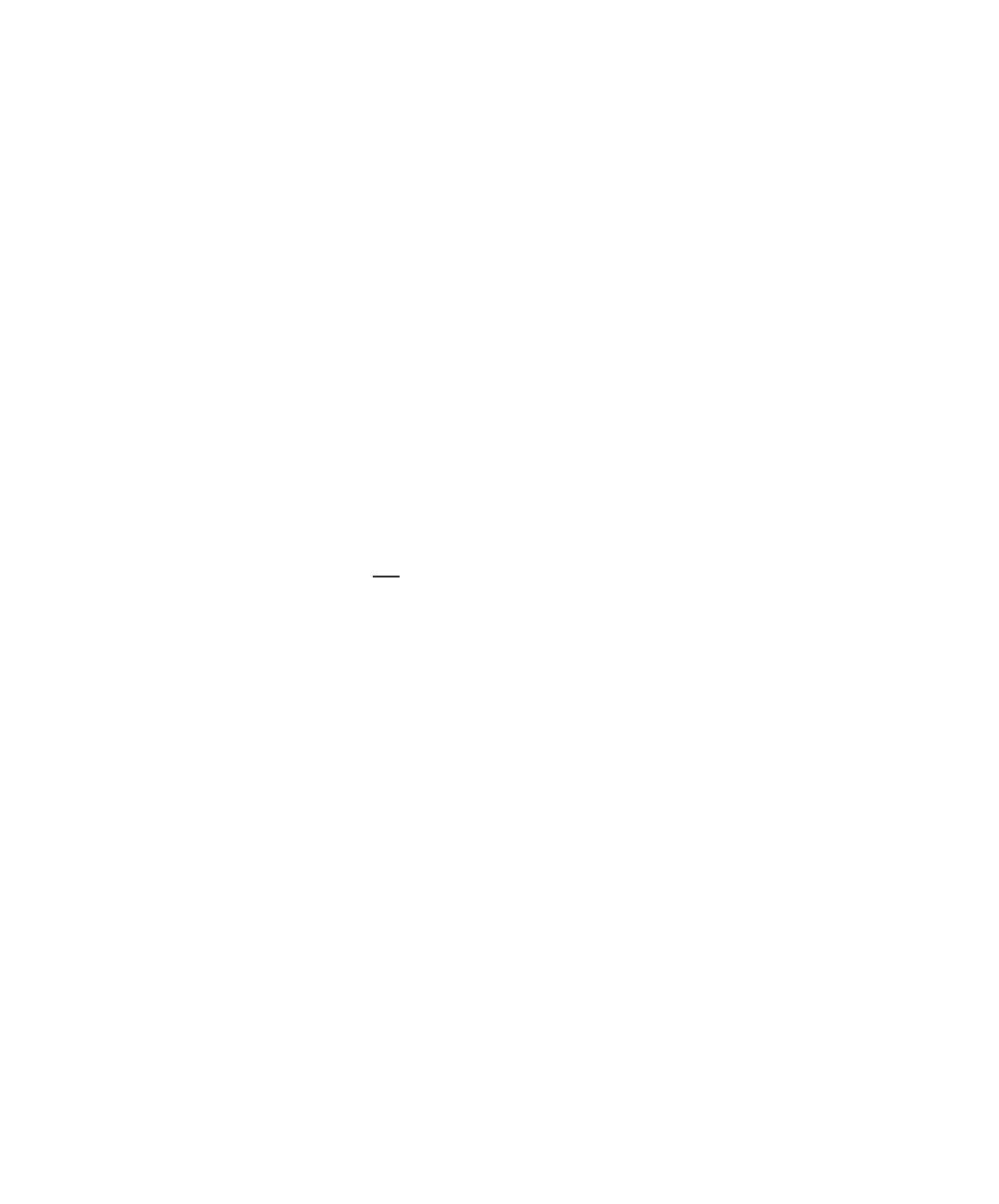
Figure 12.2 shows the important special case where we revolve the graph of a real-
valued function f : [a,b] Æ
R
. Using the standard parameterization g(t) = (t,f(t)) of the
graph of f and replacing t by x in equation (12.1), the surface obtained by revolving
the graph of f about the x-axis is parameterized by
(
)
=
(
()
()
)
px
,
q
xfx
,
cos ,
q
fx
sin
q
.
(12.2)
Partial derivatives are easy to compute for this surface:
∂
∂
p
x
(
()
()
)
=
1,
fx
¢
cos ,
q
fx
¢
sin
q
(12.3)
∂
∂
p
=-
()
(
()
)
0,
fx
sin ,
q
fx
cos
q
(12.4)
q
From this one right away knows the tangent planes at every point, because the cross
product of the partial derivatives is a normal vector (assuming that the partial deriv-
atives do not vanish).
Although surfaces of revolution are conceptually easy to describe, there are some
potentially nasty details that can give a programmer a lot of headaches. Some
problems are:
Degenerate Cases of the Curve g.
The curve may have self-intersections. If g is a
constant map, then the “surface” becomes a circle.
Figure 12.2.
A surface of revolution.