Graphics Reference
In-Depth Information
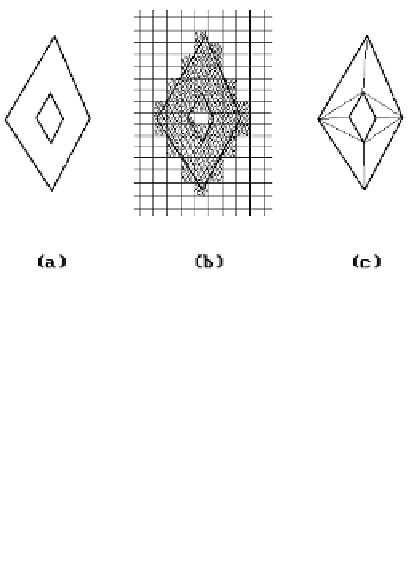
Figure 5.21.
Decomposition
representations.
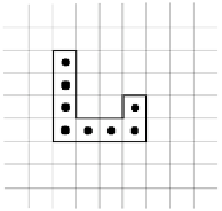
Figure 5.22.
Spatial occupancy representation.
has a relatively simple definition, something that presumably the whole object did not
have. The representation is unambiguous but certainly not unique. Cell decomposi-
tions are an essential ingredient of finite element modeling (see Chapter 19).
Certain important topological properties can be computed relatively easily from
a cell decomposition, such as answers to the questions
(1) Is the object connected?
(2) How many holes does it have?
The representation is also good for nonhomogeneous objects. See Section 7.2.4 in
[AgoM04] for a general definition of a cell complex. Handle decompositions of man-
ifolds (see Section 8.6 in [AgoM05]) are a special case of this type of representation.
Chapter 16 will address the usefulness of “intrinsic” cell decompositions of spaces.
Spatial Occupancy Enumeration.
This space-based scheme represents objects by
a finite collection of uniformly sized cells. Areas are divided into squares (pixels).
Volumes are divided into cubical cells called
voxels
, an abbreviation for “volume ele-
ments.” There are two choices here in that one can either represent the object bound-
ary or its interior. In the latter case, one can, for example, list the coordinates of the
center of grid cells in the object. See Figure 5.22.
Spatial occupancy enumeration is an ambiguous representation. Furthermore, a
big problem with this scheme is the amount of data that has to be stored. For that