Graphics Reference
In-Depth Information
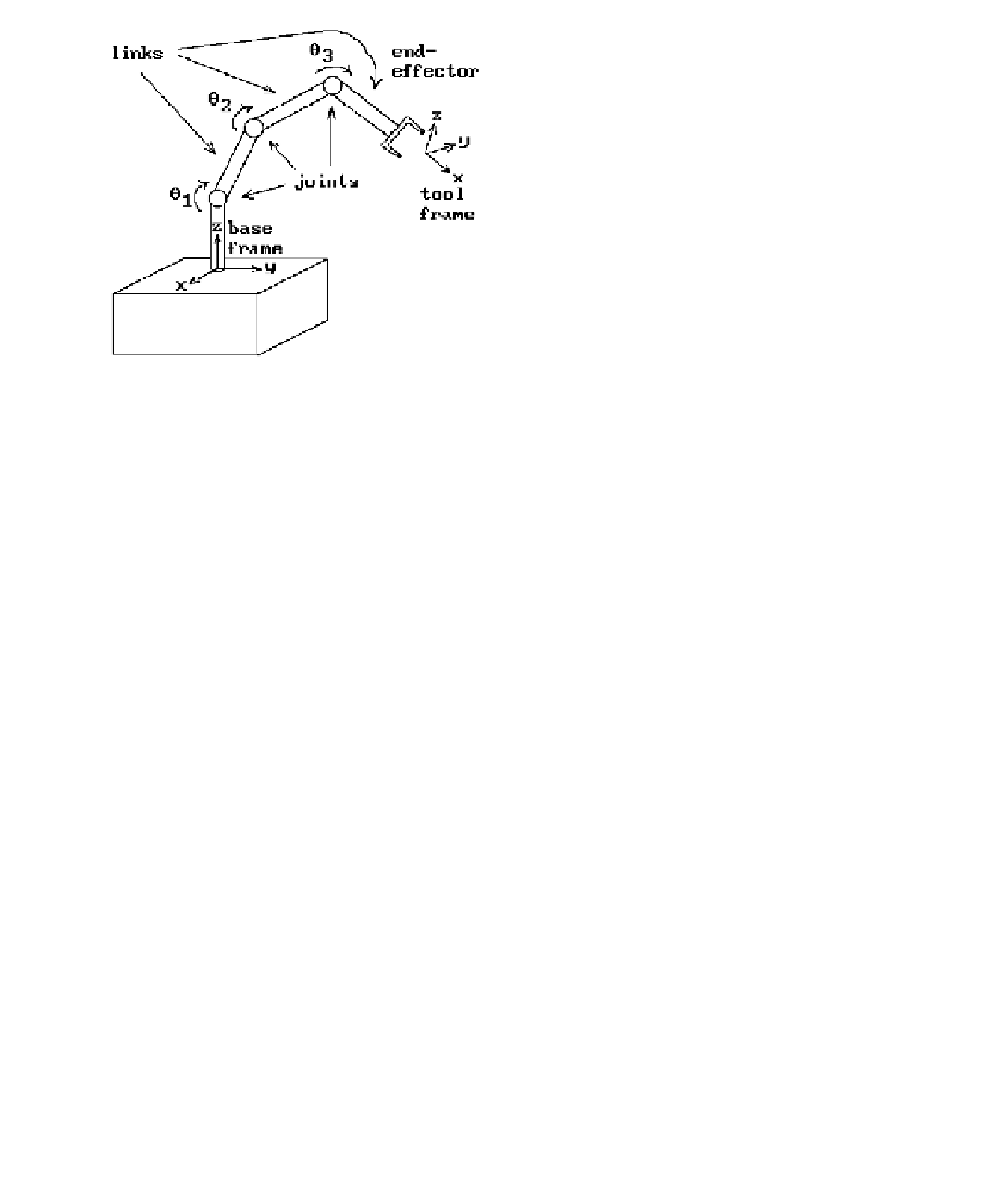
Figure 4.23.
Robot arm terminology.
Mechanical manipulators are the most important examples of industrial robots
and much work has been done to understand the mechanics and control of such
manipulators. We begin with some terminology (see [Crai89]).
Kinematics
: The science of motion where motion is studied without worrying about
what caused it.
Manipulator
: This is assumed to be an object that consists of nearly rigid
links
con-
nected by
joints
that allow neighboring links to move. One end is usually fixed to
some nonmoving part and the other end is free. See Figure 4.23. The joints may
be either
revolute joints
, which allow rotational motion measured by
joint angles
,
or
prismatic joints
, which allow sliding motion that is measured by
joint offsets
.
Degrees of freedom
of a manipulator: This is the number of variables that it takes to
completely describe the state or position of the manipulator. Typically this is the
number of joints since joints can usually be described by one variable.
End-effector
: This is the tool at the free end of the manipulator such as a gripper.
Tool frame
: The frame associated to the end-effector.
Base frame
: The frame associated to the fixed end of the manipulator.
Forward kinematics
: This is the problem where one wants to compute the tool frame
(intuitively, the position and orientation of the tool) relative to the base frame
given the set of joint angles.
Inverse kinematics
: This is the problem where one wants to compute all possible sets
of joint angles that can give rise to given tool and base frames. This problem is
usually more difficult than the forward kinematics problem. There may not even
be a solution to a particular problem or there may be more than one solution.
Workspace
for a given manipulator: The possible tool frames (position and orienta-
tion of the tool) that are achievable by the manipulator.
Trajectory generation
: The determination of the trajectories of each joint of a manip-
ulator that lead from some initial configuration to a final configuration. Since
manipulators are usually moved by actuators that apply a force or torque to each
joint, these forces and torques would also have to be computed in order for a solu-
tion to be effective.