Information Technology Reference
In-Depth Information
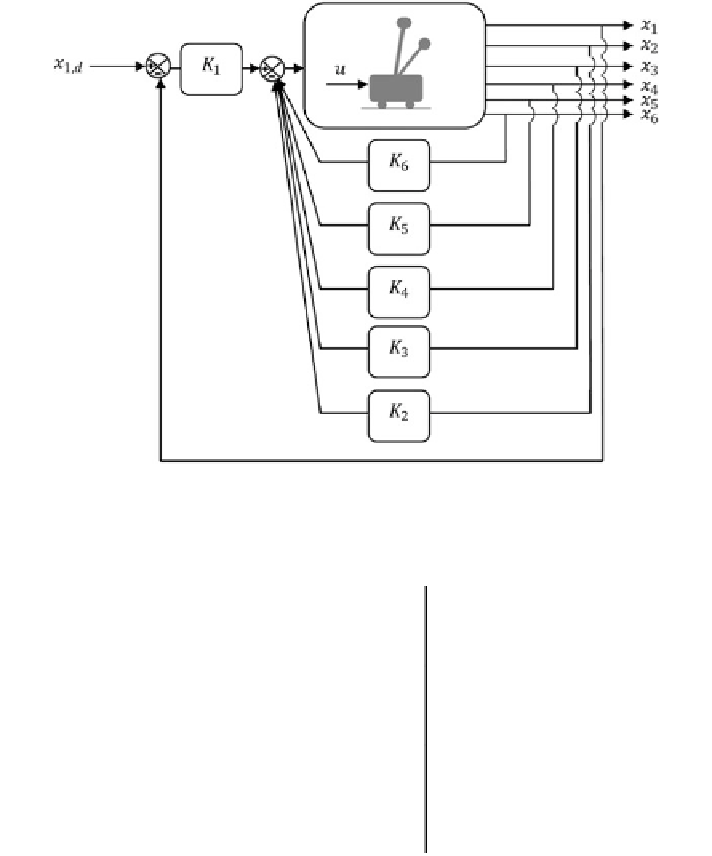
Fig. 19 The block diagram of the linear state feedback controller for a parallel-double-inverted
pendulum for
x
d
¼½
x
1
;d
;
0
;
0
;
0
;
0
;
0
T
Table 19 The values of the
parameters of the system of a
parallel-double-inverted
pendulum
m
0
4.2774 kg
m
1
0.3211 kg
m
2
0.2355 kg
l
1
0.3533 m
l
2
0.0963 m
0.072 kg m
2
H
1
0.0044 kg m
2
H
2
F
r
10 Kg/s
C
1
0
:
023 Kg m
2
=
s
C
2
0
:
00145 Kg m
2
=
s
T
x
0
¼½
0
;
0
;
0
;
0
;
0
;
0
ð
30
Þ
T
:
;
;
;
;
;
ð
Þ
x
d
¼½
0
2
0
0
0
0
0
31
50
K
1
150
ð
32
Þ
150
K
2
250
ð
33
Þ











Search WWH ::

Custom Search