Information Technology Reference
In-Depth Information
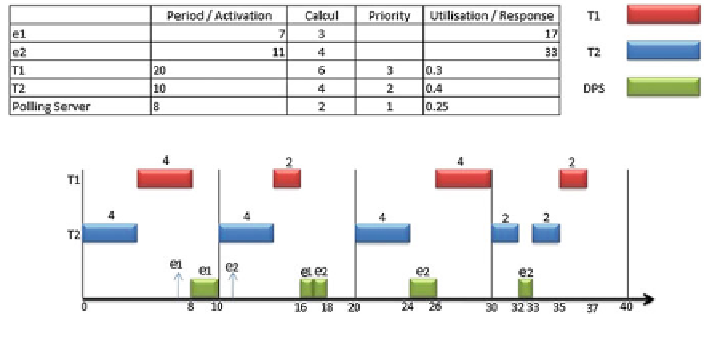
Fig. 1 The simulation with only polling server
4.2 Second Method: Hybrid Scheduling Approach
The scheduling problem of aperiodic tasks is very different from that of periodic
tasks. Indeed, scheduling algorithms for aperiodic tasks must be able to guarantee
the deadlines for hard deadline aperiodic tasks and provide good average response
times for soft deadline aperiodic tasks even though the occurrence of the aperiodic
requests are non deterministic. The aperiodic scheduling algorithm must also
accomplish these goals without compromising the hard deadlines of the periodic
tasks.
4.2.1 Contribution
One hybrid approach composed of the combination of two common approaches for
servicing aperiodic requests are background processing and polling tasks. Back-
ground servicing of aperiodic requests occurs whenever the processor is idle (i.e.,
not executing any periodic tasks and no periodic tasks pending). If the load of the
periodic task set is high, then utilization left for background service is low, and
background service opportunities are relatively infrequent.
Polling consists of creating a periodic task for servicing aperiodic requests. At
regular intervals, the polling task is started and services any pending aperiodic
requests. However, if no aperiodic requests are pending, the polling task suspends
itself until its next period and the time originally allocated for aperiodic service is
not preserved for aperiodic execution but is instead used by periodic tasks. Note
that if an aperiodic request occurs just after the polling task has suspended, then the
aperiodic request must wait until the beginning of the next polling task period or
until background processing resumes before being serviced. Even though polling
tasks and background processing can provide time for servicing aperiodic requests,
Search WWH ::

Custom Search