Information Technology Reference
In-Depth Information
0.04
0.035
0.03
0.025
0.02
0.015
0.01
0.005
0
−0.005
0
2
4
6
8
10
12
14
16
18
20
t(s)
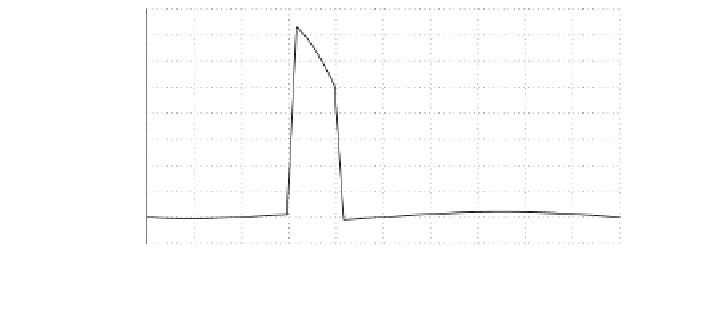
Fig. 11 Residual signal
the fault, and disappears at t
is
sensitive to f
ð
t
Þ
and insensitive to d
ð
t
Þ
. So the designed unknown input fuzzy
bilinear fault diagnosis observer can be ef
¼
8 s. Figure
11
shows that
the residual r
ð
t
Þ
ciently used to detect faults.
6 Conclusion
In this chapter, we have presented the design of unknown input observers for
nonlinear systems and their application to fault diagnosis. The considered systems
are modeled with a T-S fuzzy bilinear structure, particularly suitable for a nonlinear
system with a bilinear term. The proposed results are developed for two cases: the
first one when the decision variables are measurable, and the second is dedicated to
the case when the decision variables are unmeasurable. Convergence conditions are
established in order to guarantee the convergence of the state estimation error. The
convergence conditions of the given observer are derived using a quadratic
Lyapunov candidate function using LMI formulation. The synthesis conditions lead
to the resolution of linear constraints easy to solve with existing numerical tools.
Then, the proposed unknown input bilinear observer is applied for fault detection.
Indeed, a residual generator is considered in order to be sensitive to fault vector and
insensitive to the disturbances. These results have been successfully applied to
numerical and experimental examples.
References
Azar, A. T. (2010a). Adaptive neuro-fuzzy systems. In: A.T Azar (ed.), Fuzzy Systems. IN-TECH,
Vienna, Austria.
Azar, A. T. (2010b). Fuzzy systems. Vienna: IN-TECH.
Azar, A. T. (2012). Overview of Type-2 fuzzy logic systems. International Journal of Fuzzy
System Applications IJFSA, 2(4), 1
28.
-














































Search WWH ::

Custom Search