Information Technology Reference
In-Depth Information
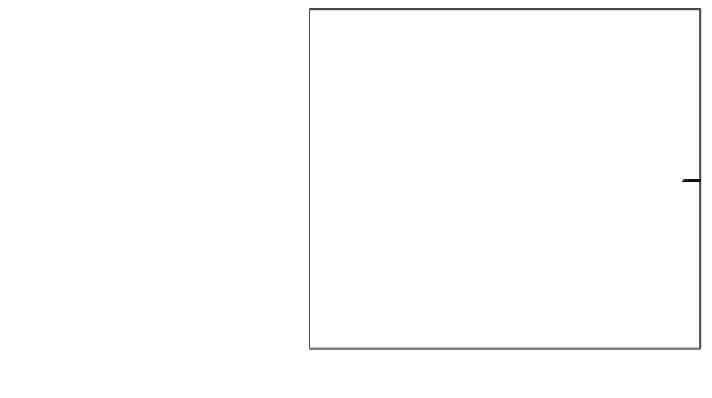
Fig. 15 Experimental results
of the PID-type FLC
implementation: speed
tracking error
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
0
10
20
30
40
50
60
70
Acquisition time (sec)
Fig. 16 Robustness of the
external disturbance rejection:
controlled speed variation
3
External load disturbance rejection
2
1
0
0
10
20
30
40
50
60
70
Acquisition time (sec)
In comparison with the results in Hagg
è
ge et al. (
2009
) for a such plant, obtained
by the use of a full order
H
1
controller, as well as those obtained by PID-type FLC
with trials-errors tuning method in Hagg
ge et al. (
2010
), the experimental results
of this study are satisfactory for a simple, non conventional and systematic meta-
heuristics-based control approach. They point out the controller
è
s viability and
performance. As shown in Figs.
14
and
15
, the measured speed tracking error is
small (less than 10 % of set point) showing the high performances of the proposed
control, especially in terms of tracking. The robustness, in terms of external load
disturbances of the proposed PID-type FLC approach, is shown in Figs.
16
and
17
.
The proposed fuzzy controller leads to reject the additive disturbances on the
controlled system output with a fast and more damped dynamic.
'
























































































Search WWH ::

Custom Search