Information Technology Reference
In-Depth Information
4.2 Simulation Results
For this study case, product-sum inference and center of gravity defuzzi
cation
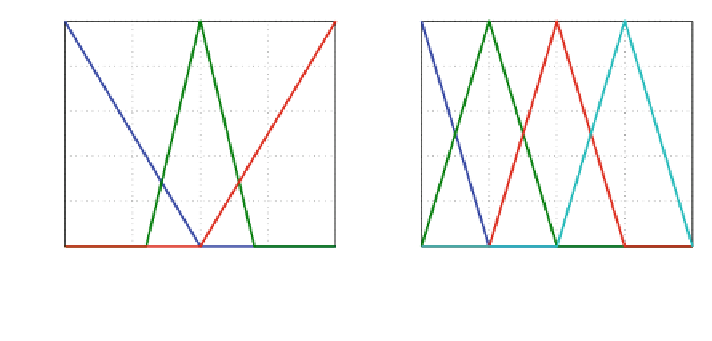
methods are adopted. Uniformly distributed and symmetrical membership functions,
are assigned for the fuzzy input and output variables, as shown in Fig.
3
.
The linguistic levels assigned to the input variables e
k
and
D
e
k
, and the output
variable
u
k
are given as follows: N (Negative), Z (Zero), P (Positive), NB
(Negative Big) and PB (Positive Big). The associated fuzzy rule-base is given in
Table
2
. The view of this rule-base is illustrated in Fig.
4
.
For our design, the initial search domain of PID-type FLC parameters is chosen
in the limit range of x
low
¼
D
ð
1
;
5
;
2
;
25
Þ
and x
up
¼
ð
5
;
10
;
10
;
50
Þ
. For all proposed
metaheuristics, we use a population size equal to N
¼
30 and run all used algo-
rithms under k
max
¼
100 iterations. The size of optimization problem is equal
¼
to D
4. The decision variables are the scaling factors of the studied particular
PID-type FLC structure, i.e.,
a
b
, K
e
and K
d
.
In this study, the control problem constraints are de
,
ned by the maximum values
max
d
¼
%
), settling time (t
max
s
¼
:
of the performance criteria: overshoot (
20
0
9s)
and steady state error (E
max
ss
¼
0
:
0001). The scaling penalty parameter is chosen as
10
4
. The algorithm stops when the number of generations
constant equal to
k
l
¼
reaches the speci
ed value for the maximum number of generations.
NB
N
Z
P
P
B
N
Z
P
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
Δ
u
k
e
k
,
Δ
e
k
Fig. 3 Membership functions for fuzzy inputs and output variables
Table 2 Fuzzy rule-base for
the standard FLC
e
k
,
ʔ
e
k
N
Z
P
N
NB
N
Z
Z
N
Z
P
P
Z
P
PB
















































Search WWH ::

Custom Search