Information Technology Reference
In-Depth Information
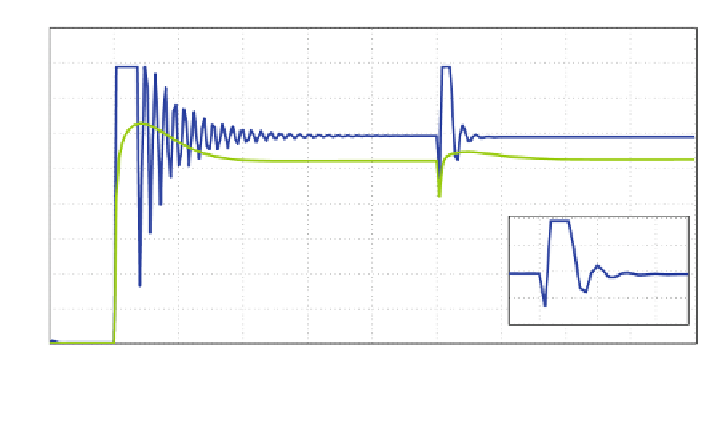
dynamics of flow for PI and FUZZY regulator
9
8
7
6
5
4
8
3
7
2
6
Evolution de débit avec le controleur flou
Evolution de débit avec le controleur PI
5
1
4
30
32
34
0
0
5
10
15
20
25
30
35
40
45
50
K
Fig. 30 Evolution of flow for the two types of regulators
5 Conclusion
In this work, we have applied the Takagi-Sugeno algorithm to a station of irrigation
with sprinkling (real pumping station) and obtained real values from the station.
The system is taken as a black box with outputs pressure and
fl
ow. We have
modeled and identified the system by the FCM algorithm.
After obtained the T-S model we have validated curves is almost identical to the
real ones. The obtained linear model gives a good description of the system
behavior in the particle area of nonlinear system, and the importance of the clus-
tering methods.
Even for the control results, the comparison between the results obtained of the
two controls types (PI, Fuzzy) enables us to conclude that the fuzzy controller
makes it possible to cost reduce of the water pumping.
References
Azar, A. T. (2010a). Adaptive neuro-fuzzy systems. In A.T. Azar (Ed.), Fuzzy systems. IN-TECH,
Vienna, Austria. ISBN 978-953-7619-92-3.
Azar, A. T. (2010b). Fuzzy systems. Vienna, Austria: IN-TECH. ISBN 978-953-7619-92-3.
Azar, A. T. (2012). Overview of type-2 fuzzy logic systems. International Journal of Fuzzy System
Applications (IJFSA), 2(4), 1
28.
Bertrand, A., & Moonen, M. (2012). Low complexity distributed total least squares estimation in
ad hoc sensor networks. IEEE Transactions on Signal Processing, 60(8), 4321
-
4333.
Bezdek, J. (1981). Pattern recognition with fuzzy objective function algorithms. New York:
Plenum Press.
-



































































Search WWH ::

Custom Search