Information Technology Reference
In-Depth Information
40
20
0
−20
−40
−160
−140
−120
−100
−80
−60
−40
−20
0
20
Real part
20
10
0
−10
−20
−40
−35
−30
−25
−20
−15
−10
−5
0
Real part
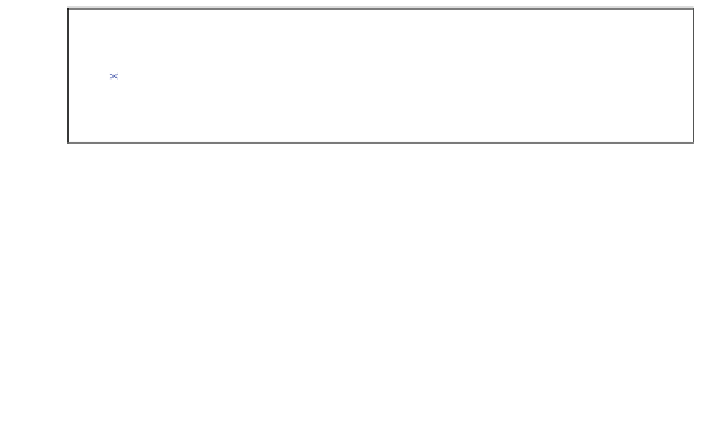
Fig. 10 Poles distribution of beam reduced switched system (order 24) with DRK-SLS method
4 Iterative Dual Rational Krylov for Linear Switched
Systems
In this section the proposed method is given, the iterative dual rational Krylov
model reduction for switched linear system, is an extended version of the dual
rational Krylov method for switched linear system. Iterative dual rational Krylov is
a connection between the Krylov-based reduction method and the interpolation of
the expansion points. Given a stable switched linear system as the form (
1
) and
using the eigenvalues criterion in the choice of the interpolation points (Flagg et al.
2012
; Kouki et al.
2013a
,
2014a
,
b
). However, this method generated two Krylov
subspaces V
r
q
and Z
r
q
for each subsystem, the generation of the two Krylov sub-
spaces is performed iteratively until
the satisfaction of the stopping criterion
ðð
and guarantees the biorthogonalithy condition of the two
Krylov subspaces for each subsystem (i.e. Z
r
q
V
r
q
¼
s
ð
i
þ
1
Þ
q
s
i
q
Þ=
s
ð
i
þ
1
Þ
q
Þ
I
r
q
where r
q
is the order of
reduced system) (Druskin and Simoncini
2011
; Gallivan et al.
1996
; Quarteroni
et al.
2007
). Theorem 1 summarizes this result:
Theorem 1 Take a switched linear system as a form (
1
) and the interpolation point
f
n
r
n
r
s
i
q
g
for i
q
¼
1
; ...;
r
q
. Let V
r
q
2
R
and Z
r
q
2
R
be obtained as follows
(Grimme
1997
):
(
A
q
Þ
1
B
q
Z
r
q
¼ Span
ð
s
1
q
I
A
q
Þ
T
C
q
; ...; ð
s
r
q
I
A
q
Þ
T
C
q
A
q
Þ
1
B
q
; ...; ð
V
r
q
¼
Span
ð
s
1
q
I
s
r
q
I
ð
21
Þ
with Z
r
q
V
r
q
¼
I
r
q
.



































































































































Search WWH ::

Custom Search