Information Technology Reference
In-Depth Information
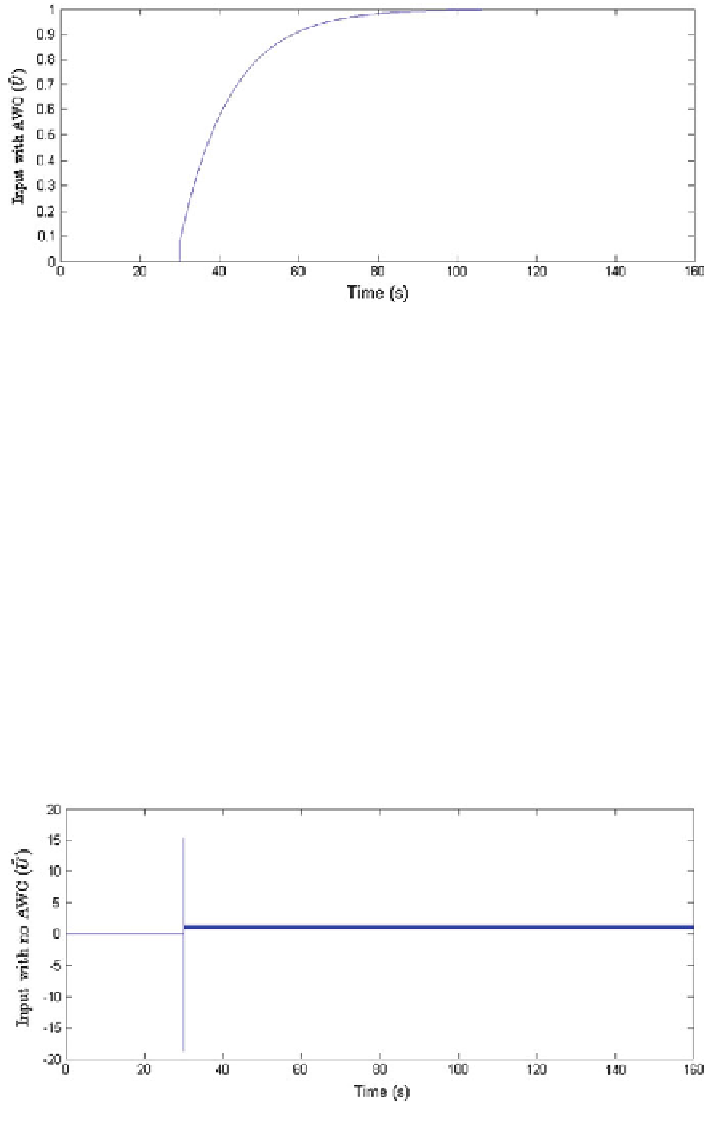
Fig. 5 Control input
~
u of the anti windup controller
In Fig.
6
the control input U with no AWC is shown, where the nonsaturated
signal applied to the system is depicted proving that this signal is more irregular
than in the AWC version due to the increasing of the integral action producing an
abrupt change in the input signal deteriorating the system response.
As it is corroborated in Figs.
7
and
8
these results are affected by the non
saturated signals, especially when there is not AWC compensation due to the
compensators improves the system performance considerably in comparison when
there is no AWC compensation.
In Figs.
7
and
8
the respective control inputs with AWC and AWC compen-
sation are shown, where as it is expected, the control input of the saturated system
with no anti windup compensation is deteriorated due to the increasing of the
integral action when the input of the system is saturated. This effect is improved by
the IMC PID AWC compensation, because the extra feedback added to the model
reduces the integral action when the system is saturated.
Fig. 6 Control input
~
u when there is no anti windup controller compensation
Search WWH ::

Custom Search