Information Technology Reference
In-Depth Information
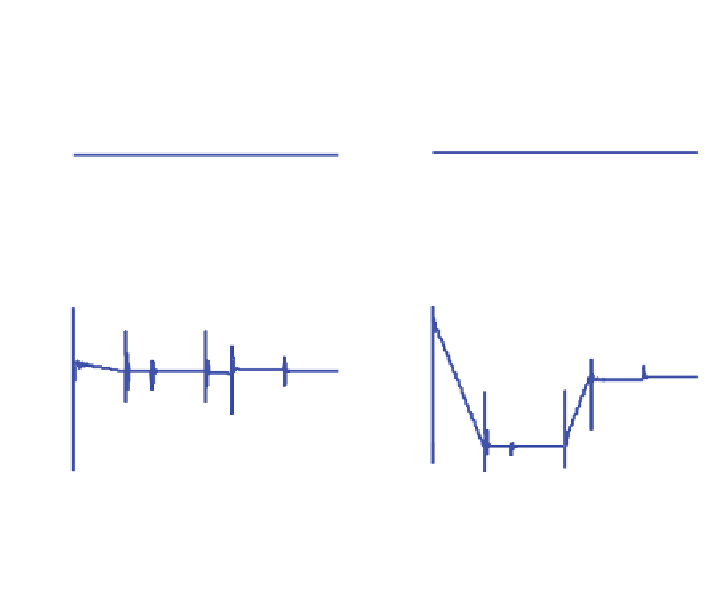
(a)
(b)
2
383
1
382
0
381
-1
380
0
0.5
1
0
0.5
1
time(s)
time(s)
(c)
(d)
200
400
0
200
-200
0
-400
-200
0
0.5
1
0
0.5
1
time(s)
time(s)
Fig. 7 Voltages applied to the DFI-Motor
7 Conclusion
In this chapter, a new fuzzy adaptive backstepping controller has been developed
for a DFI-Motor. A Lyapunov approach has been adopted to derive the parameter
adaptation laws and prove the stability of the control system as well as the
asymptotic convergence of the underlying tracking and estimation errors to zero.
Simulation results show clearly the effectiveness of this control approach. In spite
of the presence of the model uncertainties, the dynamic behavior of the DFI-Motor
presents high performances in terms of the speed and the load torque tracking
accuracy, satisfactory
flux control and consequently, stator reactive power regula-
tion to zero in steady-state. It is worth noting that the control methodology proposed
here can be easily extended to any other high performance electric drives. In our
future work, one will address the experimental implementation of this proposed
control scheme and the design of a speed sensorless controller.
fl



































































































Search WWH ::

Custom Search