Graphics Reference
In-Depth Information
term (see Section 9.3) of the snake internal energy will quickly even out the
points during the evolution phase. Figure 9.3 shows the evolution of a closed
snake when applied to the cell segmentation problem.
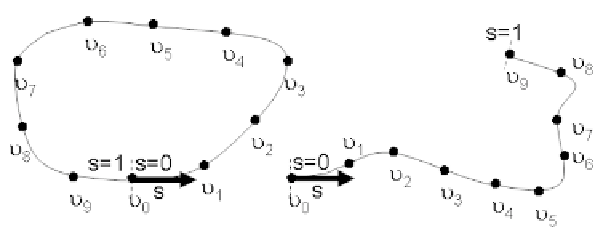
Fig. 9.2.
Parameterized and discretized closed and open snakes.
9.3 Energy Functional
The initial position of the snake is usually specified by the user based on
a
priori
knowledge of the image under analysis. Often the initial snake may
be drawn with a mouse or drawing tablet for convenience. Once initialized,
the evolution of the snake can be considered as the process of minimizing the
following energy functional
1
:
E
snake
=
1
0
E
int
(
ν
(
s
)) +
E
image
(
ν
(
s
)) +
E
forces
(
ν
(
s
))
(9.3)
where
E
int
is the internal energy term,
E
image
is the image energy term, and
E
forces
is the external forces constraints term. In Kass et al. [88], the internal
energy of the snake is defined as follows:
E
int
(
ν
(
s
)) =
α
(
s
)
∂s
ν
(
s
)
+
β
(
s
)
∂s
2
ν
(
s
)
2
2
∂
2
∂
/
2
thin-plate term
.
(9.4)
membrane term
The spline energy is defined by a first-order term controlled by
α
(
s
) and a
second-order term controlled by
β
(
s
). The first-order term provides behavior
similar to the elasticity exhibited by a membrane
2
and the second-order term
provides behavior similar to the stiffness exhibited by a thin metal plate. The
1
A functional is a function of a function.
2
Equation (9.4) is a membrane equation known from mechanics combined with a
stiffness-term.



Search WWH ::

Custom Search