Game Development Reference
In-Depth Information
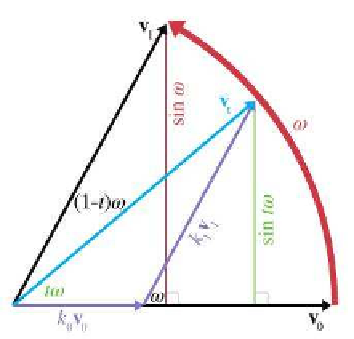
Figure 8.12
Interpolating a vector about an arc
Applying some trig to the right triangle with k
1
v
1
as the hypotenuse
(and recalling that
v
1
is a unit vector), we see that
sinω =
sintω
k
1
,
k
1
=
sintω
sinω
.
A similar technique to solve for k
0
yields the following result:
k
0
=
sin(1 − t)ω
sinω
.
Thus,
v
t
can be expressed as
v
t
= k
0
v
0
+ k
1
v
1
=
sin(1 − t)ω
sinω
v
0
+
sintω
sinω
v
1
.
The same basic idea can be extended into quaternion space, and we can
reformulate the slerp as
slerp(
q
0
,
q
1
,t) =
sin(1 − t)ω
sinω
q
0
+
sintω
Quaternion slerp in
practice
sinω
q
1
.
We just need a way to compute ω, the “angle” between the two quater-
nions. As it turns out, an analogy from 2D vector math can be carried into
quaternion space; we can think of the quaternion dot product as returning
cosω.
There are two slight complications. First, the two quaternions
q
and
−
q
represent the same orientation, but may produce different results when






Search WWH ::

Custom Search