Game Development Reference
In-Depth Information
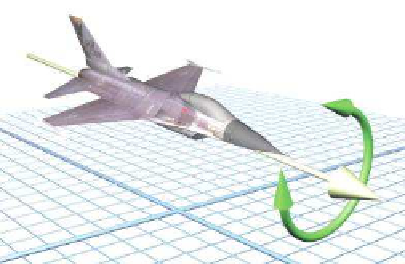
that we twisted the vector, we will change the orientation of the jet. In
Section 8.3,
we refer to this twisting component of an object's orientation
as bank.
Figure 8.2
Twisting an object changes
its orientation
The fundamental difference between direction and orientation is seen
concretely by the fact that we can parameterize a direction in 3D with just
two numbers (the spherical coordinate angles—see Section 7.3.2), whereas
an orientation requires a minimum of three numbers (Euler angles—see
Section 8.3).
Section 2.4.1 discussed that it's impossible to describe the position of
an object in absolute terms—we must always do so within the context of
a specific reference frame. When we investigated the relationship between
“points” and “vectors,” we noticed that specifying a position is actually
the same as specifying an amount of translation from some other given
reference point (usually the origin of some coordinate system).
In the same way, orientation cannot be described in absolute terms. Just
as a position is given by a translation from some known point, an orientation
is given by a rotation from some known reference orientation (often called
the “identity” or “home” orientation). The amount of rotation is known
as an angular displacement. In other words, describing an orientation is
mathematically equivalent to describing an angular displacement.
We say “mathematically equivalent” because in this topic, we make a
subtle distinction between “orientation” and terms such as “angular dis-
placement” and “rotation.” It is helpful to think of an “angular displace-
ment” as an operator that accepts an input and produces an output. A
particular direction of transformation is implied; for example, the angu-
lar displacement from the old orientation to the new orientation, or from
upright space to object space. An example of an angular displacement is,
“Rotate 90
o
about the z-axis.” It's an action that we can perform on a
vector.







Search WWH ::

Custom Search