Information Technology Reference
In-Depth Information
Environment
Sensors
Plant
Controller
Actuators
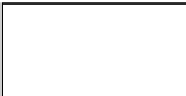
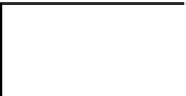
Fig. 3.
Structure of an Embedded System
with sensors, actuators and the controller with its program. In the following we
assume that components communicate by observing each others states. We dis-
cuss the interface provided by sensor and actuator components; but we will not
cover paradigms for intelligent sensors and actuators that integrate knowledge
of the plant model. Examples that illustrate such aspects are found in the design
for the Steam Boiler case study [12].
3.1
Sensors
A sensor is characterized by its ability to detect that the plant is in some specic
state, and it communicates this fact to the control program. We shall start with
a description of a general sensor that transmits a value from the plant state to
the controller state. The value of the plant state
X
is determined by a given
formula
D
(
x
) parameterized by a rigid variable
x
. The controller state ranges
over a phase
where the sensor is enabled, and phases
x
which are entered
when
D
(
x
) is observed during the
phase.
Progress:
When
D
(
x
) holds for
in phase
, the phase is left for the continu-
ation phase
x
:
)
8
x
(
D
(
x
)
^de
−! d
x
)
e
x
.
Selection:
When
D
(
x
) is stable, phase
moves only to
d:e
;(
de^
D
(
x
))
−! d _
x
e
The selection constraint is essential for the further use of the value of
x
in the
continuation phase. Without this constraint a sensor might just move rapidly
from
with an arbitrary value.














Search WWH ::

Custom Search